 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDual-arm Coordinated Manipulation for Object Twisting with Human Intelligence
Aug 26, 2021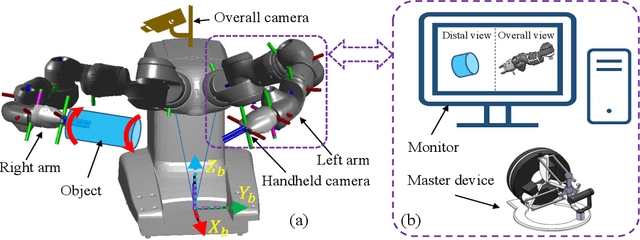
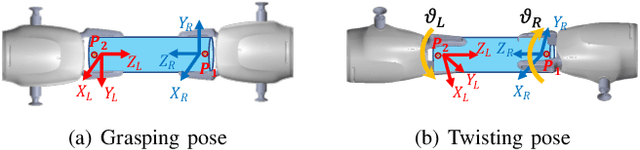
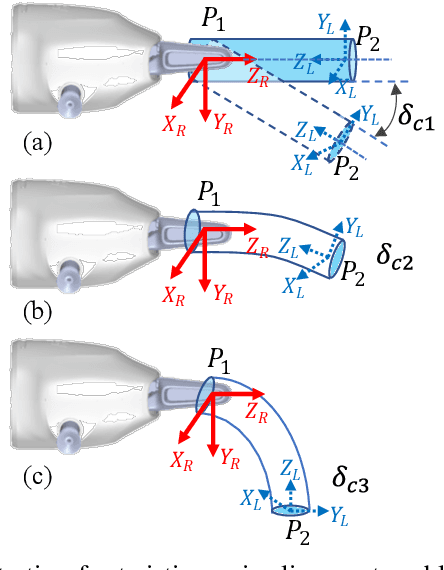
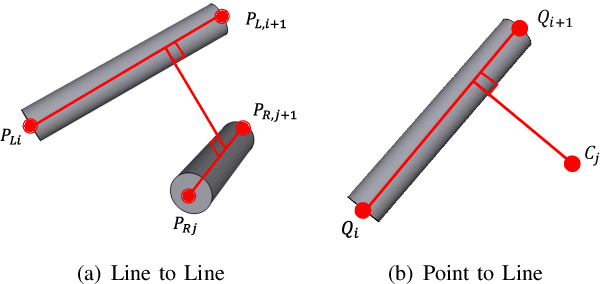
Robotic dual-arm twisting is a common but very challenging task in both industrial production and daily services, as it often requires dexterous collaboration, a large scale of end-effector rotating, and good adaptivity for object manipulation. Meanwhile, safety and efficiency are preliminary concerns for robotic dual-arm coordinated manipulation. Thus, the normally adopted fully automated task execution approaches based on environmental perception and motion planning techniques are still inadequate and problematic for the arduous twisting tasks. To this end, this paper presents a novel strategy of the dual-arm coordinated control for twisting manipulation based on the combination of optimized motion planning for one arm and real-time telecontrol with human intelligence for the other. The analysis and simulation results showed it can achieve collision and singularity free for dual arms with enhanced dexterity, safety, and efficiency.
Hybrid Data-Driven and Analytical Model for Kinematic Control of a Surgical Robotic Tool
Jun 09, 2020


Accurate kinematic models are essential for effective control of surgical robots. For tendon driven robots, which is common for minimally invasive surgery, intrinsic nonlinearities are important to consider. Traditional analytical methods allow to build the kinematic model of the system by making certain assumptions and simplifications on the nonlinearities. Machine learning techniques, instead, allow to recover a more complex model based on the acquired data. However, analytical models are more generalisable, but can be over-simplified; data-driven models, on the other hand, can cater for more complex models, but are less generalisable and the result is highly affected by the training dataset. In this paper, we present a novel approach to combining analytical and data-driven approaches to model the kinematics of nonlinear tendon-driven surgical robots. Gaussian Process Regression (GPR) is used for learning the data-driven model and the proposed method is tested on both simulated data and real experimental data.
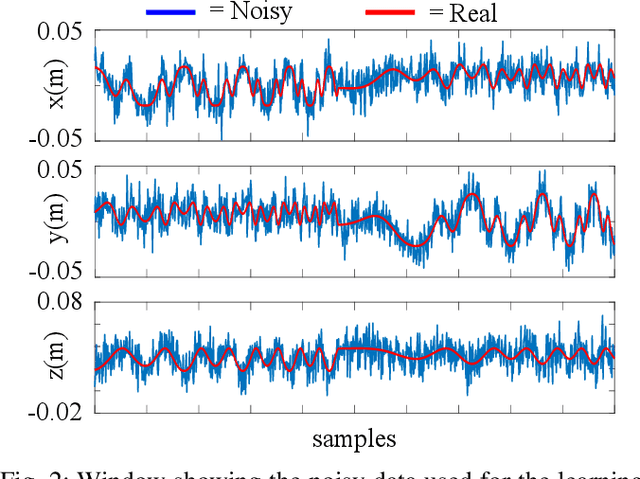
A Robust Regression Approach for Robot Model Learning
Aug 23, 2019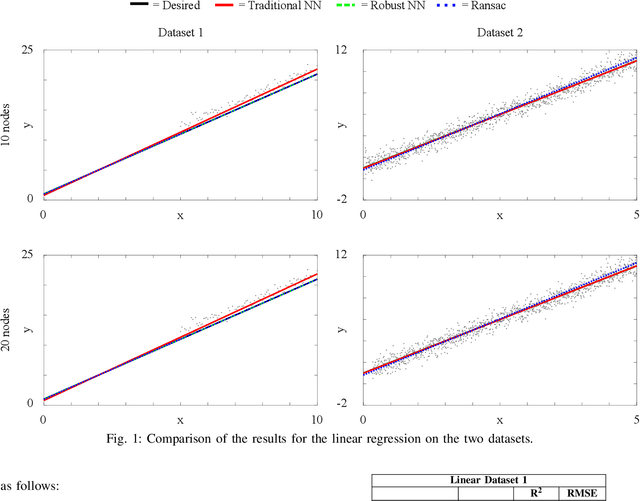

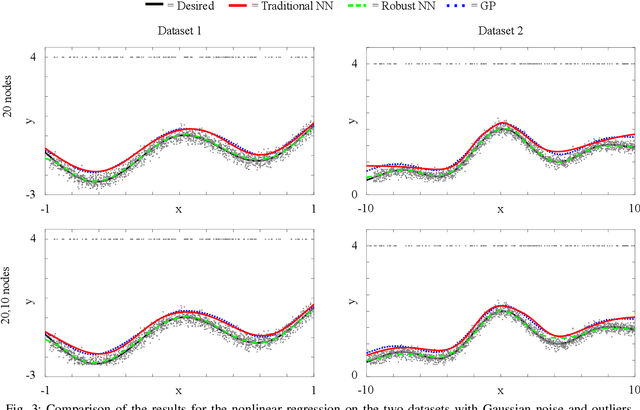

Machine learning and data analysis have been used in many robotics fields, especially for modelling. Data are usually the result of sensor measurements and, as such, they might be subjected to noise and outliers. The presence of outliers has a huge impact on modelling the acquired data, resulting in inappropriate models. In this work a novel approach for outlier detection and rejection for input/output mapping in regression problems is presented. The robustness of the method is shown both through simulated data for linear and nonlinear regression, and real sensory data. Despite being validated by using artificial neural networks, the method can be generalized to any other regression method