Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Robust Regression Approach for Robot Model Learning
Paper and Code
Aug 23, 2019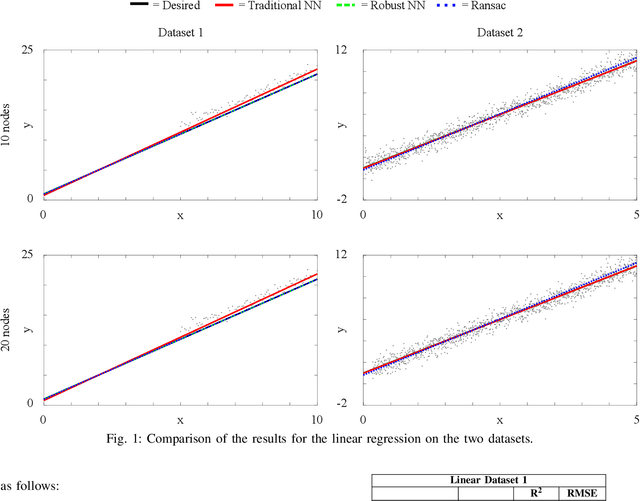

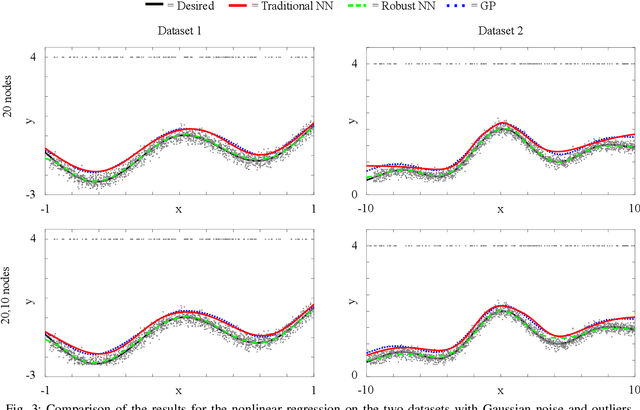

Machine learning and data analysis have been used in many robotics fields, especially for modelling. Data are usually the result of sensor measurements and, as such, they might be subjected to noise and outliers. The presence of outliers has a huge impact on modelling the acquired data, resulting in inappropriate models. In this work a novel approach for outlier detection and rejection for input/output mapping in regression problems is presented. The robustness of the method is shown both through simulated data for linear and nonlinear regression, and real sensory data. Despite being validated by using artificial neural networks, the method can be generalized to any other regression method
* 5 pages; 4 figures; to be presented at IROS 2019, Nov 4-8
View paper on