 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZero-shot Imitation Policy via Search in Demonstration Dataset
Jan 29, 2024Behavioral cloning uses a dataset of demonstrations to learn a policy. To overcome computationally expensive training procedures and address the policy adaptation problem, we propose to use latent spaces of pre-trained foundation models to index a demonstration dataset, instantly access similar relevant experiences, and copy behavior from these situations. Actions from a selected similar situation can be performed by the agent until representations of the agent's current situation and the selected experience diverge in the latent space. Thus, we formulate our control problem as a dynamic search problem over a dataset of experts' demonstrations. We test our approach on BASALT MineRL-dataset in the latent representation of a Video Pre-Training model. We compare our model to state-of-the-art, Imitation Learning-based Minecraft agents. Our approach can effectively recover meaningful demonstrations and show human-like behavior of an agent in the Minecraft environment in a wide variety of scenarios. Experimental results reveal that performance of our search-based approach clearly wins in terms of accuracy and perceptual evaluation over learning-based models.
Behavioral Cloning via Search in Embedded Demonstration Dataset
Jun 15, 2023Behavioural cloning uses a dataset of demonstrations to learn a behavioural policy. To overcome various learning and policy adaptation problems, we propose to use latent space to index a demonstration dataset, instantly access similar relevant experiences, and copy behavior from these situations. Actions from a selected similar situation can be performed by the agent until representations of the agent's current situation and the selected experience diverge in the latent space. Thus, we formulate our control problem as a search problem over a dataset of experts' demonstrations. We test our approach on BASALT MineRL-dataset in the latent representation of a Video PreTraining model. We compare our model to state-of-the-art Minecraft agents. Our approach can effectively recover meaningful demonstrations and show human-like behavior of an agent in the Minecraft environment in a wide variety of scenarios. Experimental results reveal that performance of our search-based approach is comparable to trained models, while allowing zero-shot task adaptation by changing the demonstration examples.
Towards Solving Fuzzy Tasks with Human Feedback: A Retrospective of the MineRL BASALT 2022 Competition
Mar 23, 2023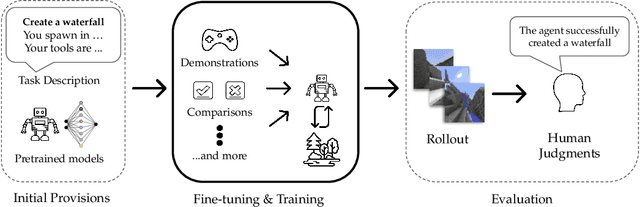
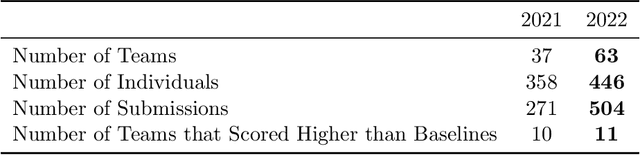
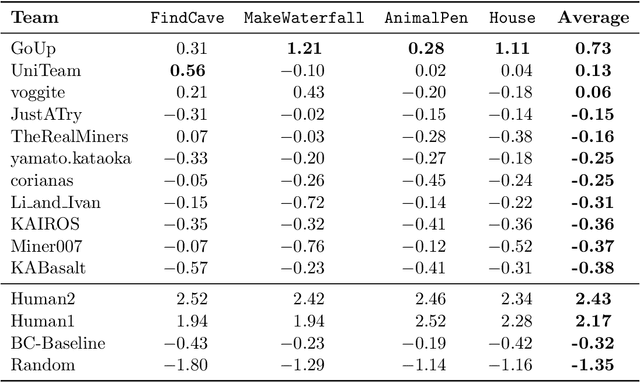
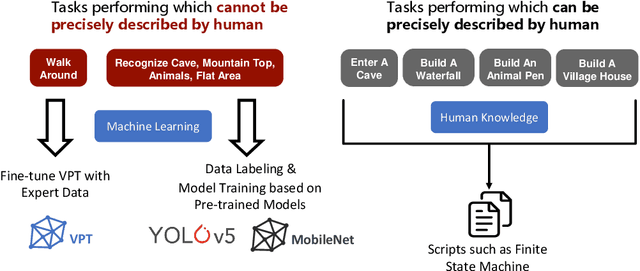
To facilitate research in the direction of fine-tuning foundation models from human feedback, we held the MineRL BASALT Competition on Fine-Tuning from Human Feedback at NeurIPS 2022. The BASALT challenge asks teams to compete to develop algorithms to solve tasks with hard-to-specify reward functions in Minecraft. Through this competition, we aimed to promote the development of algorithms that use human feedback as channels to learn the desired behavior. We describe the competition and provide an overview of the top solutions. We conclude by discussing the impact of the competition and future directions for improvement.
Behavioral Cloning via Search in Video PreTraining Latent Space
Dec 27, 2022Our aim is to build autonomous agents that can solve tasks in environments like Minecraft. To do so, we used an imitation learning-based approach. We formulate our control problem as a search problem over a dataset of experts' demonstrations, where the agent copies actions from a similar demonstration trajectory of image-action pairs. We perform a proximity search over the BASALT MineRL-dataset in the latent representation of a Video PreTraining model. The agent copies the actions from the expert trajectory as long as the distance between the state representations of the agent and the selected expert trajectory from the dataset do not diverge. Then the proximity search is repeated. Our approach can effectively recover meaningful demonstration trajectories and show human-like behavior of an agent in the Minecraft environment.