 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstrained Robotic Navigation on Preferred Terrains Using LLMs and Speech Instruction: Exploiting the Power of Adverbs
Apr 02, 2024This paper explores leveraging large language models for map-free off-road navigation using generative AI, reducing the need for traditional data collection and annotation. We propose a method where a robot receives verbal instructions, converted to text through Whisper, and a large language model (LLM) model extracts landmarks, preferred terrains, and crucial adverbs translated into speed settings for constrained navigation. A language-driven semantic segmentation model generates text-based masks for identifying landmarks and terrain types in images. By translating 2D image points to the vehicle's motion plane using camera parameters, an MPC controller can guides the vehicle towards the desired terrain. This approach enhances adaptation to diverse environments and facilitates the use of high-level instructions for navigating complex and challenging terrains.
Uncertainty-aware hybrid paradigm of nonlinear MPC and model-based RL for offroad navigation: Exploration of transformers in the predictive model
Oct 01, 2023



In this paper, we investigate a hybrid scheme that combines nonlinear model predictive control (MPC) and model-based reinforcement learning (RL) for navigation planning of an autonomous model car across offroad, unstructured terrains without relying on predefined maps. Our innovative approach takes inspiration from BADGR, an LSTM-based network that primarily concentrates on environment modeling, but distinguishes itself by substituting LSTM modules with transformers to greatly elevate the performance our model. Addressing uncertainty within the system, we train an ensemble of predictive models and estimate the mutual information between model weights and outputs, facilitating dynamic horizon planning through the introduction of variable speeds. Further enhancing our methodology, we incorporate a nonlinear MPC controller that accounts for the intricacies of the vehicle's model and states. The model-based RL facet produces steering angles and quantifies inherent uncertainty. At the same time, the nonlinear MPC suggests optimal throttle settings, striking a balance between goal attainment speed and managing model uncertainty influenced by velocity. In the conducted studies, our approach excels over the existing baseline by consistently achieving higher metric values in predicting future events and seamlessly integrating the vehicle's kinematic model for enhanced decision-making. The code and the evaluation data are available at https://github.com/FARAZLOTFI/offroad_autonomous_navigation/).
Drowsiness Detection Based On Driver Temporal Behavior Using a New Developed Dataset
Mar 31, 2021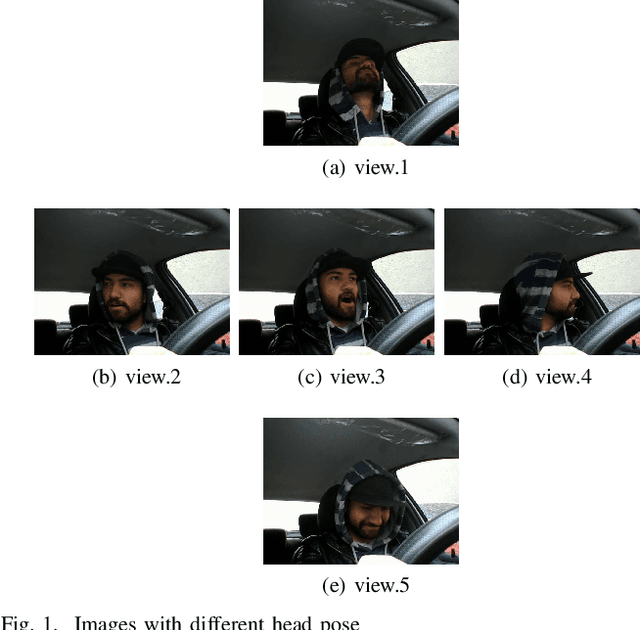
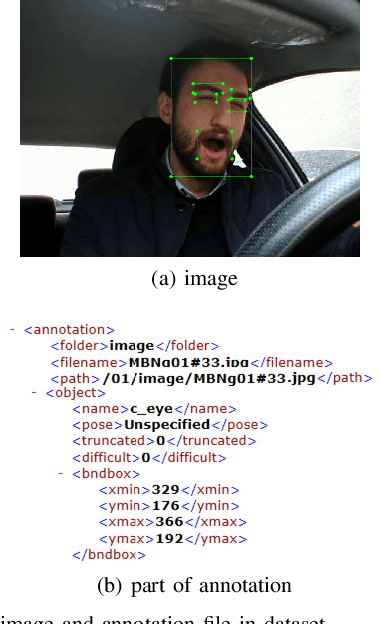
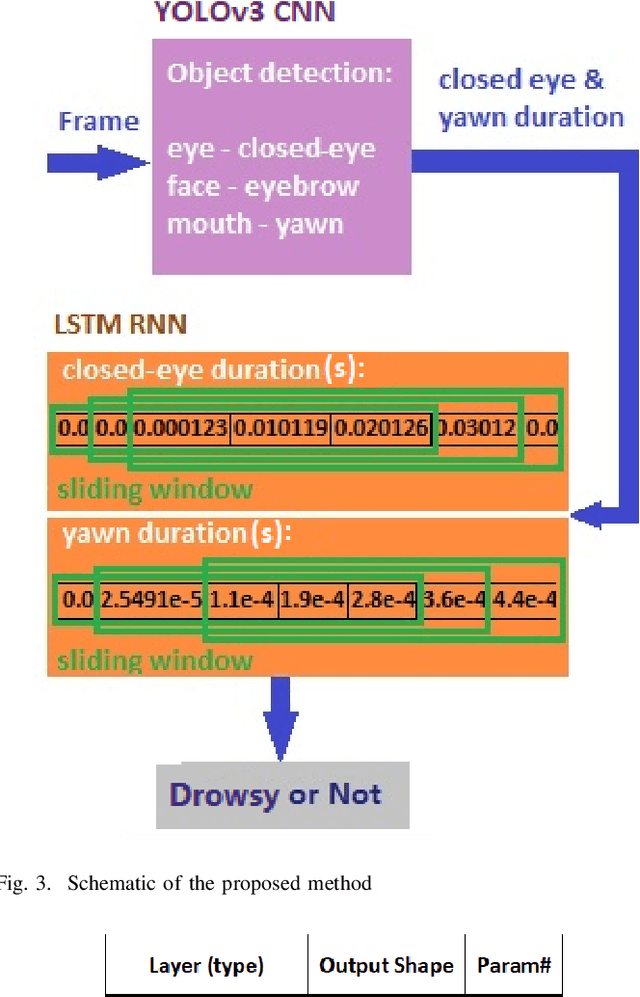
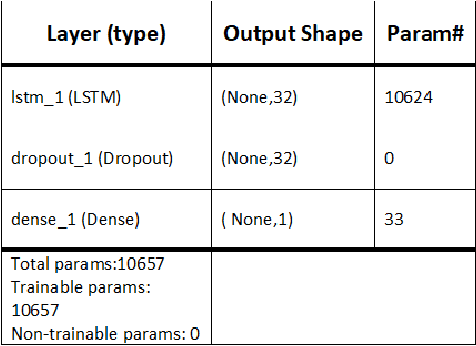
Driver drowsiness detection has been the subject of many researches in the past few decades and various methods have been developed to detect it. In this study, as an image-based approach with adequate accuracy, along with the expedite process, we applied YOLOv3 (You Look Only Once-version3) CNN (Convolutional Neural Network) for extracting facial features automatically. Then, LSTM (Long-Short Term Memory) neural network is employed to learn driver temporal behaviors including yawning and blinking time period as well as sequence classification. To train YOLOv3, we utilized our collected dataset alongside the transfer learning method. Moreover, the dataset for the LSTM training process is produced by the mentioned CNN and is formatted as a two-dimensional sequence comprised of eye blinking and yawning time durations. The developed dataset considers both disturbances such as illumination and drivers' head posture. To have real-time experiments a multi-thread framework is developed to run both CNN and LSTM in parallel. Finally, results indicate the hybrid of CNN and LSTM ability in drowsiness detection and the effectiveness of the proposed method.
Object Localization Through a Single Multiple-Model Convolutional Neural Network with a Specific Training Approach
Mar 24, 2021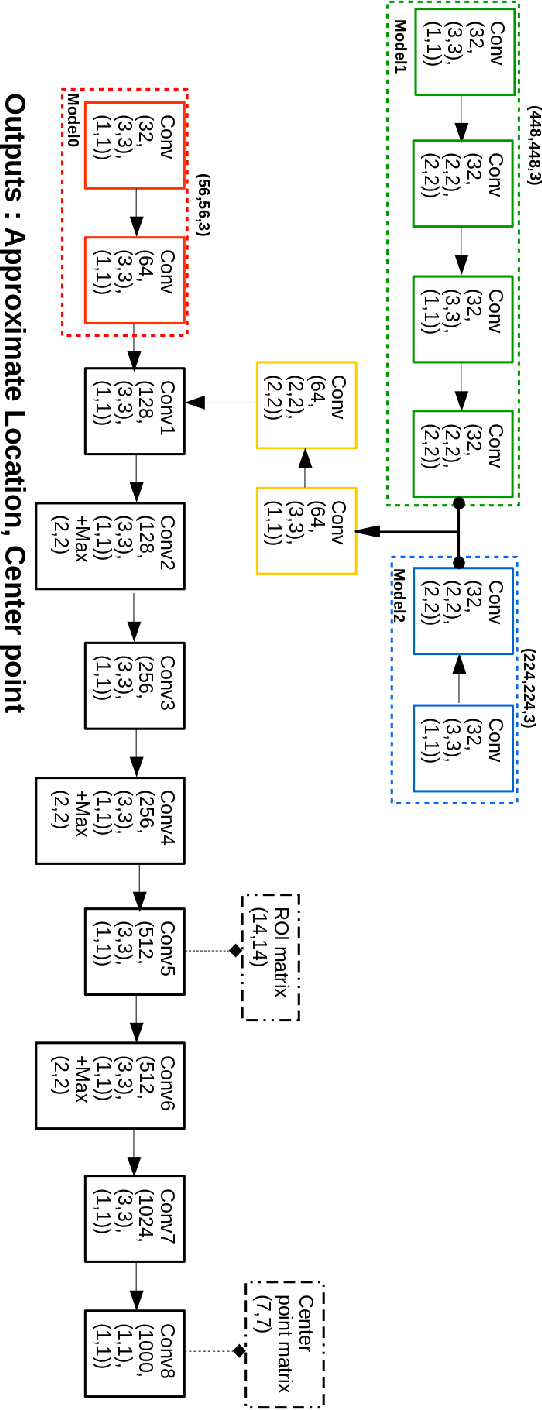


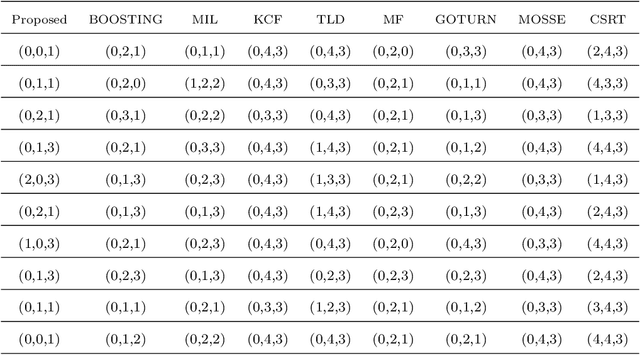
Object localization has a vital role in any object detector, and therefore, has been the focus of attention by many researchers. In this article, a special training approach is proposed for a light convolutional neural network (CNN) to determine the region of interest (ROI) in an image while effectively reducing the number of probable anchor boxes. Almost all CNN-based detectors utilize a fixed input size image, which may yield poor performance when dealing with various object sizes. In this paper, a different CNN structure is proposed taking three different input sizes, to enhance the performance. In order to demonstrate the effectiveness of the proposed method, two common data set are used for training while tracking by localization application is considered to demonstrate its final performance. The promising results indicate the applicability of the presented structure and the training method in practice.