 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Heuristics for Transit Network Design and Improvement with Deep Reinforcement Learning
Apr 15, 2024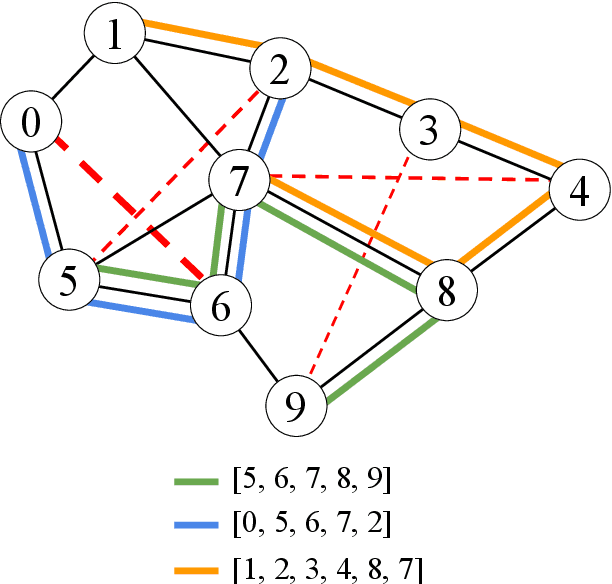

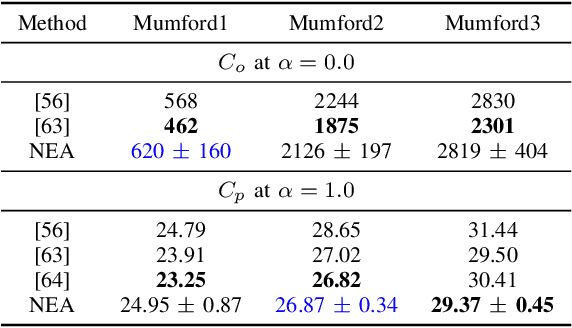
Transit agencies world-wide face tightening budgets. To maintain quality of service while cutting costs, efficient transit network design is essential. But planning a network of public transit routes is a challenging optimization problem. The most successful approaches to date use metaheuristic algorithms to search through the space of possible transit networks by applying low-level heuristics that randomly alter routes in a network. The design of these low-level heuristics has a major impact on the quality of the result. In this paper we use deep reinforcement learning with graph neural nets to learn low-level heuristics for an evolutionary algorithm, instead of designing them manually. These learned heuristics improve the algorithm's results on benchmark synthetic cities with 70 nodes or more, and obtain state-of-the-art results when optimizing operating costs. They also improve upon a simulation of the real transit network in the city of Laval, Canada, by as much as 54% and 18% on two key metrics, and offer cost savings of up to 12% over the city's existing transit network.
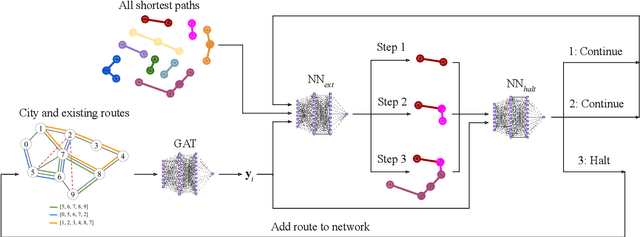
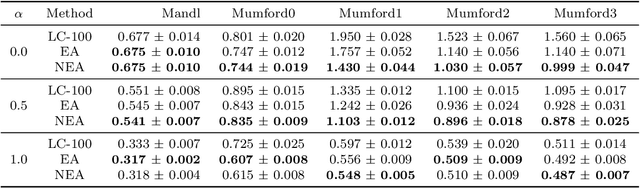
A Neural-Evolutionary Algorithm for Autonomous Transit Network Design
Mar 14, 2024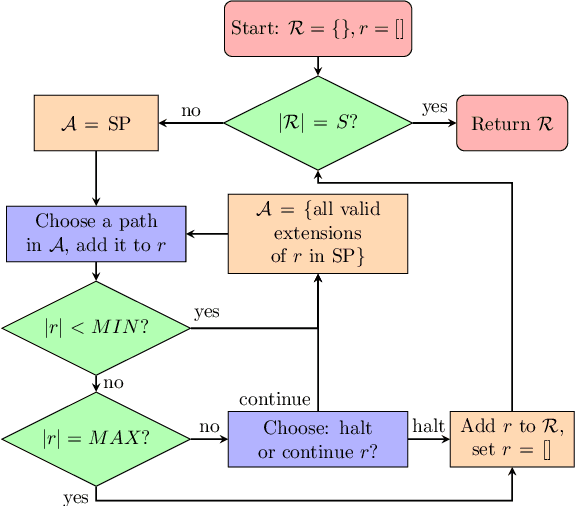
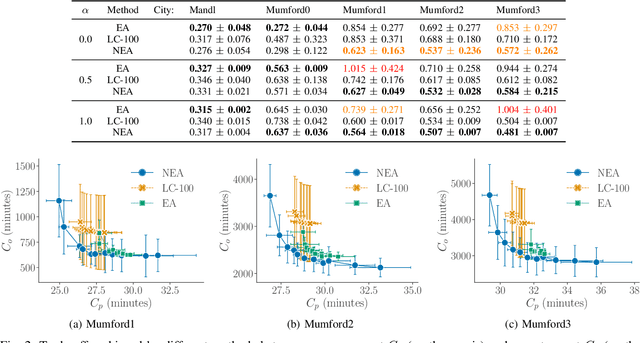
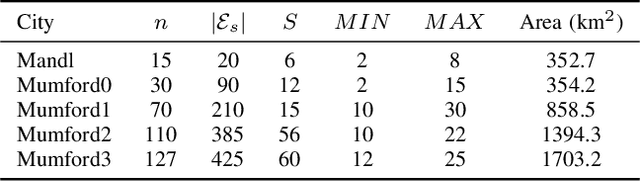
Planning a public transit network is a challenging optimization problem, but essential in order to realize the benefits of autonomous buses. We propose a novel algorithm for planning networks of routes for autonomous buses. We first train a graph neural net model as a policy for constructing route networks, and then use the policy as one of several mutation operators in a evolutionary algorithm. We evaluate this algorithm on a standard set of benchmarks for transit network design, and find that it outperforms the learned policy alone by up to 20% and a plain evolutionary algorithm approach by up to 53% on realistic benchmark instances.
Uncertainty-aware hybrid paradigm of nonlinear MPC and model-based RL for offroad navigation: Exploration of transformers in the predictive model
Oct 01, 2023



In this paper, we investigate a hybrid scheme that combines nonlinear model predictive control (MPC) and model-based reinforcement learning (RL) for navigation planning of an autonomous model car across offroad, unstructured terrains without relying on predefined maps. Our innovative approach takes inspiration from BADGR, an LSTM-based network that primarily concentrates on environment modeling, but distinguishes itself by substituting LSTM modules with transformers to greatly elevate the performance our model. Addressing uncertainty within the system, we train an ensemble of predictive models and estimate the mutual information between model weights and outputs, facilitating dynamic horizon planning through the introduction of variable speeds. Further enhancing our methodology, we incorporate a nonlinear MPC controller that accounts for the intricacies of the vehicle's model and states. The model-based RL facet produces steering angles and quantifies inherent uncertainty. At the same time, the nonlinear MPC suggests optimal throttle settings, striking a balance between goal attainment speed and managing model uncertainty influenced by velocity. In the conducted studies, our approach excels over the existing baseline by consistently achieving higher metric values in predicting future events and seamlessly integrating the vehicle's kinematic model for enhanced decision-making. The code and the evaluation data are available at https://github.com/FARAZLOTFI/offroad_autonomous_navigation/).
Scale-Robust Localization Using General Object Landmarks
May 24, 2018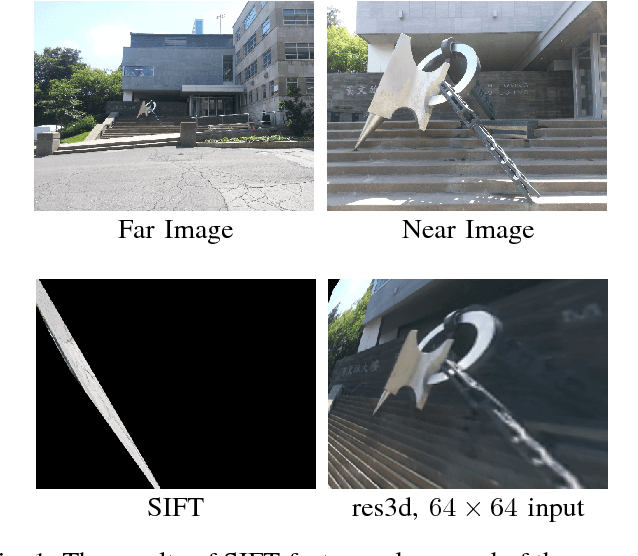
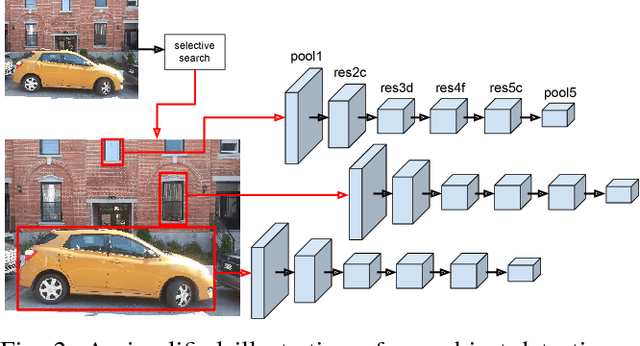

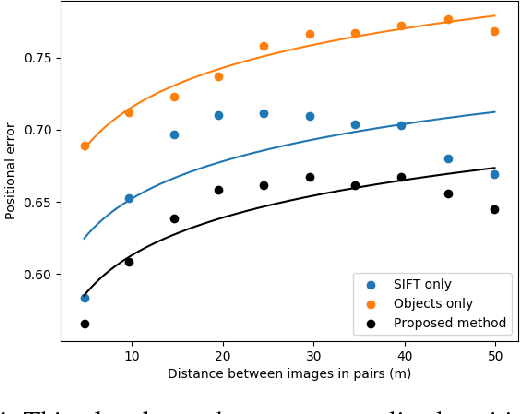
Visual localization under large changes in scale is an important capability in many robotic mapping applications, such as localizing at low altitudes in maps built at high altitudes, or performing loop closure over long distances. Existing approaches, however, are robust only up to about a 3x difference in scale between map and query images. We propose a novel combination of deep-learning-based object features and state-of-the-art SIFT point-features that yields improved robustness to scale change. This technique is training-free and class-agnostic, and in principle can be deployed in any environment out-of-the-box. We evaluate the proposed technique on the KITTI Odometry benchmark and on a novel dataset of outdoor images exhibiting changes in visual scale of $7\times$ and greater, which we have released to the public. Our technique consistently outperforms localization using either SIFT features or the proposed object features alone, achieving both greater accuracy and much lower failure rates under large changes in scale.