 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeeing the Unseen: How EMoE Unveils Bias in Text-to-Image Diffusion Models
May 19, 2025



Estimating uncertainty in text-to-image diffusion models is challenging because of their large parameter counts (often exceeding 100 million) and operation in complex, high-dimensional spaces with virtually infinite input possibilities. In this paper, we propose Epistemic Mixture of Experts (EMoE), a novel framework for efficiently estimating epistemic uncertainty in diffusion models. EMoE leverages pre-trained networks without requiring additional training, enabling direct uncertainty estimation from a prompt. We leverage a latent space within the diffusion process that captures epistemic uncertainty better than existing methods. Experimental results on the COCO dataset demonstrate EMoE's effectiveness, showing a strong correlation between uncertainty and image quality. Additionally, EMoE identifies under-sampled languages and regions with higher uncertainty, revealing hidden biases in the training set. This capability demonstrates the relevance of EMoE as a tool for addressing fairness and accountability in AI-generated content.
Uncertainty-aware hybrid paradigm of nonlinear MPC and model-based RL for offroad navigation: Exploration of transformers in the predictive model
Oct 01, 2023



In this paper, we investigate a hybrid scheme that combines nonlinear model predictive control (MPC) and model-based reinforcement learning (RL) for navigation planning of an autonomous model car across offroad, unstructured terrains without relying on predefined maps. Our innovative approach takes inspiration from BADGR, an LSTM-based network that primarily concentrates on environment modeling, but distinguishes itself by substituting LSTM modules with transformers to greatly elevate the performance our model. Addressing uncertainty within the system, we train an ensemble of predictive models and estimate the mutual information between model weights and outputs, facilitating dynamic horizon planning through the introduction of variable speeds. Further enhancing our methodology, we incorporate a nonlinear MPC controller that accounts for the intricacies of the vehicle's model and states. The model-based RL facet produces steering angles and quantifies inherent uncertainty. At the same time, the nonlinear MPC suggests optimal throttle settings, striking a balance between goal attainment speed and managing model uncertainty influenced by velocity. In the conducted studies, our approach excels over the existing baseline by consistently achieving higher metric values in predicting future events and seamlessly integrating the vehicle's kinematic model for enhanced decision-making. The code and the evaluation data are available at https://github.com/FARAZLOTFI/offroad_autonomous_navigation/).
Escaping the Sample Trap: Fast and Accurate Epistemic Uncertainty Estimation with Pairwise-Distance Estimators
Aug 25, 2023


This work introduces a novel approach for epistemic uncertainty estimation for ensemble models using pairwise-distance estimators (PaiDEs). These estimators utilize the pairwise-distance between model components to establish bounds on entropy and uses said bounds as estimates for information-based criterion. Unlike recent deep learning methods for epistemic uncertainty estimation, which rely on sample-based Monte Carlo estimators, PaiDEs are able to estimate epistemic uncertainty up to 100$\times$ faster, over a larger space (up to 100$\times$) and perform more accurately in higher dimensions. To validate our approach, we conducted a series of experiments commonly used to evaluate epistemic uncertainty estimation: 1D sinusoidal data, Pendulum-v0, Hopper-v2, Ant-v2 and Humanoid-v2. For each experimental setting, an Active Learning framework was applied to demonstrate the advantages of PaiDEs for epistemic uncertainty estimation.
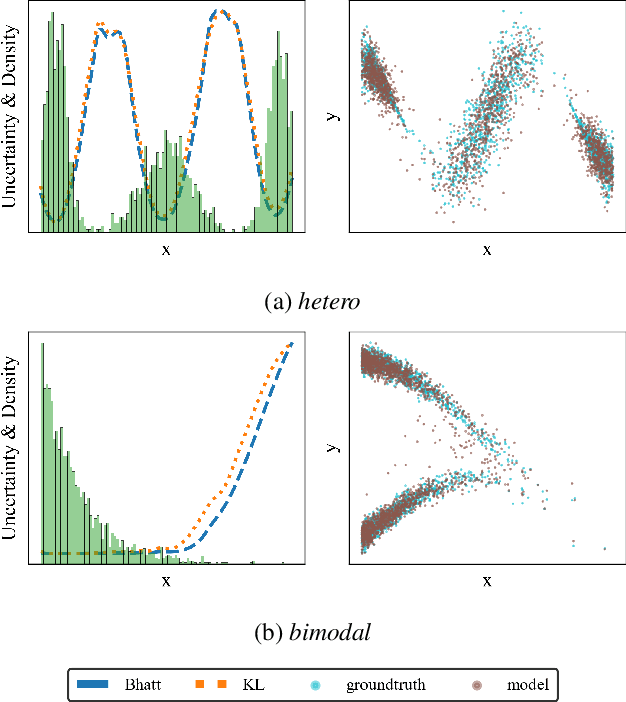
Normalizing Flow Ensembles for Rich Aleatoric and Epistemic Uncertainty Modeling
Feb 02, 2023In this work, we demonstrate how to reliably estimate epistemic uncertainty while maintaining the flexibility needed to capture complicated aleatoric distributions. To this end, we propose an ensemble of Normalizing Flows (NF), which are state-of-the-art in modeling aleatoric uncertainty. The ensembles are created via sets of fixed dropout masks, making them less expensive than creating separate NF models. We demonstrate how to leverage the unique structure of NFs, base distributions, to estimate aleatoric uncertainty without relying on samples, provide a comprehensive set of baselines, and derive unbiased estimates for differential entropy. The methods were applied to a variety of experiments, commonly used to benchmark aleatoric and epistemic uncertainty estimation: 1D sinusoidal data, 2D windy grid-world ($\it{Wet Chicken}$), $\it{Pendulum}$, and $\it{Hopper}$. In these experiments, we setup an active learning framework and evaluate each model's capability at measuring aleatoric and epistemic uncertainty. The results show the advantages of using NF ensembles in capturing complicated aleatoric while maintaining accurate epistemic uncertainty estimates.