 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEpisodic Memory Verbalization using Hierarchical Representations of Life-Long Robot Experience
Sep 26, 2024Verbalization of robot experience, i.e., summarization of and question answering about a robot's past, is a crucial ability for improving human-robot interaction. Previous works applied rule-based systems or fine-tuned deep models to verbalize short (several-minute-long) streams of episodic data, limiting generalization and transferability. In our work, we apply large pretrained models to tackle this task with zero or few examples, and specifically focus on verbalizing life-long experiences. For this, we derive a tree-like data structure from episodic memory (EM), with lower levels representing raw perception and proprioception data, and higher levels abstracting events to natural language concepts. Given such a hierarchical representation built from the experience stream, we apply a large language model as an agent to interactively search the EM given a user's query, dynamically expanding (initially collapsed) tree nodes to find the relevant information. The approach keeps computational costs low even when scaling to months of robot experience data. We evaluate our method on simulated household robot data, human egocentric videos, and real-world robot recordings, demonstrating its flexibility and scalability.
Memory-centered and Affordance-based Framework for Mobile Manipulation
Jan 30, 2024



Performing versatile mobile manipulation actions in human-centered environments requires highly sophisticated software frameworks that are flexible enough to handle special use cases, yet general enough to be applicable across different robotic systems, tasks, and environments. This paper presents a comprehensive memory-centered, affordance-based, and modular uni- and multi-manual grasping and mobile manipulation framework, applicable to complex robot systems with a high number of degrees of freedom such as humanoid robots. By representing mobile manipulation actions through affordances, i.e., interaction possibilities of the robot with its environment, we unify the autonomous manipulation process for known and unknown objects in arbitrary environments. Our framework is integrated and embedded into the memory-centric cognitive architecture of the ARMAR humanoid robot family. This way, robots can not only interact with the physical world but also use common knowledge about objects, and learn and adapt manipulation strategies. We demonstrate the applicability of the framework in real-world experiments, including grasping known and unknown objects, object placing, and semi-autonomous bimanual grasping of objects on two different humanoid robot platforms.
How to Raise a Robot -- A Case for Neuro-Symbolic AI in Constrained Task Planning for Humanoid Assistive Robots
Dec 27, 2023



Humanoid robots will be able to assist humans in their daily life, in particular due to their versatile action capabilities. However, while these robots need a certain degree of autonomy to learn and explore, they also should respect various constraints, for access control and beyond. We explore the novel field of incorporating privacy, security, and access control constraints with robot task planning approaches. We report preliminary results on the classical symbolic approach, deep-learned neural networks, and modern ideas using large language models as knowledge base. From analyzing their trade-offs, we conclude that a hybrid approach is necessary, and thereby present a new use case for the emerging field of neuro-symbolic artificial intelligence.
Incremental Learning of Humanoid Robot Behavior from Natural Interaction and Large Language Models
Sep 08, 2023



Natural-language dialog is key for intuitive human-robot interaction. It can be used not only to express humans' intents, but also to communicate instructions for improvement if a robot does not understand a command correctly. Of great importance is to endow robots with the ability to learn from such interaction experience in an incremental way to allow them to improve their behaviors or avoid mistakes in the future. In this paper, we propose a system to achieve incremental learning of complex behavior from natural interaction, and demonstrate its implementation on a humanoid robot. Building on recent advances, we present a system that deploys Large Language Models (LLMs) for high-level orchestration of the robot's behavior, based on the idea of enabling the LLM to generate Python statements in an interactive console to invoke both robot perception and action. The interaction loop is closed by feeding back human instructions, environment observations, and execution results to the LLM, thus informing the generation of the next statement. Specifically, we introduce incremental prompt learning, which enables the system to interactively learn from its mistakes. For that purpose, the LLM can call another LLM responsible for code-level improvements of the current interaction based on human feedback. The improved interaction is then saved in the robot's memory, and thus retrieved on similar requests. We integrate the system in the robot cognitive architecture of the humanoid robot ARMAR-6 and evaluate our methods both quantitatively (in simulation) and qualitatively (in simulation and real-world) by demonstrating generalized incrementally-learned knowledge.
Conceptual Design of the Memory System of the Robot Cognitive Architecture ArmarX
Jun 05, 2022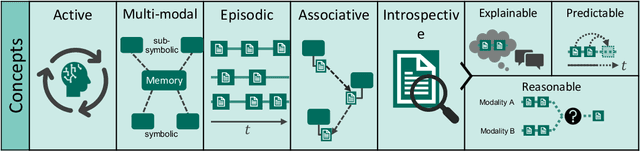
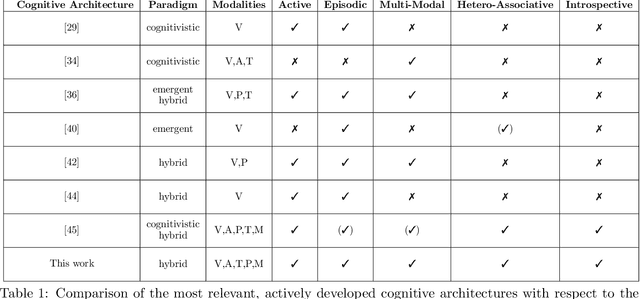
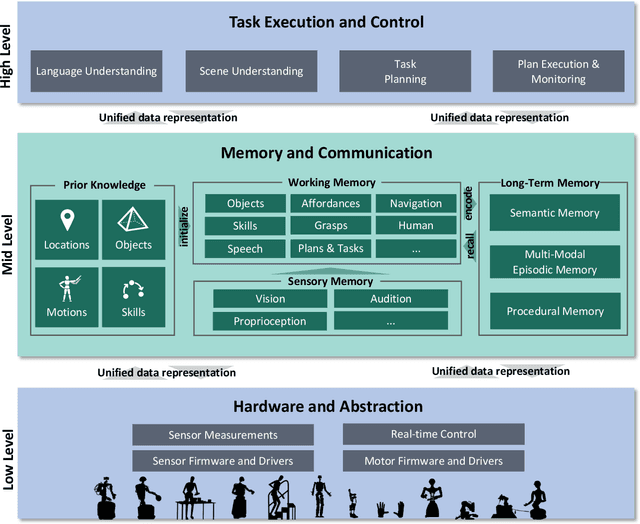
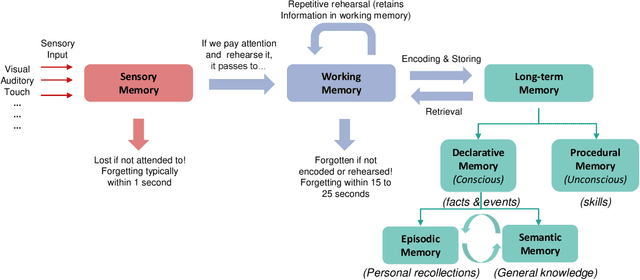
We consider the memory system as a key component of any technical cognitive system that can play a central role in bridging the gap between high-level symbolic discrete representations used for reasoning, planning and semantic scene understanding and low-level sensorimotor continuous representations used for control. In this work we described conceptual and technical characteristics such a memory system has to fulfill, together with the underlying data representation. We identify these characteristics based on the experience we gained in developing our ARMAR humanoid robot systems and discuss practical examples that demonstrate what a memory system of a humanoid robot performing tasks in human-centered environments should support, such as multi-modality, introspectability, hetero associativity, predictability or an inherently episodic structure. Based on these characteristics, we extended our robot software framework ArmarX into a unified cognitive architecture that is used in robots of the ARMAR humanoid robot family. Further, we describe, how the development of robot software led us to this novel memory-enabled cognitive architecture and we show how the memory is used by the robots to implement memory-driven behaviors.