 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMemory-centered and Affordance-based Framework for Mobile Manipulation
Jan 30, 2024



Performing versatile mobile manipulation actions in human-centered environments requires highly sophisticated software frameworks that are flexible enough to handle special use cases, yet general enough to be applicable across different robotic systems, tasks, and environments. This paper presents a comprehensive memory-centered, affordance-based, and modular uni- and multi-manual grasping and mobile manipulation framework, applicable to complex robot systems with a high number of degrees of freedom such as humanoid robots. By representing mobile manipulation actions through affordances, i.e., interaction possibilities of the robot with its environment, we unify the autonomous manipulation process for known and unknown objects in arbitrary environments. Our framework is integrated and embedded into the memory-centric cognitive architecture of the ARMAR humanoid robot family. This way, robots can not only interact with the physical world but also use common knowledge about objects, and learn and adapt manipulation strategies. We demonstrate the applicability of the framework in real-world experiments, including grasping known and unknown objects, object placing, and semi-autonomous bimanual grasping of objects on two different humanoid robot platforms.
Conceptual Design of the Memory System of the Robot Cognitive Architecture ArmarX
Jun 05, 2022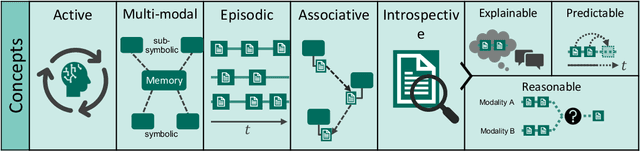
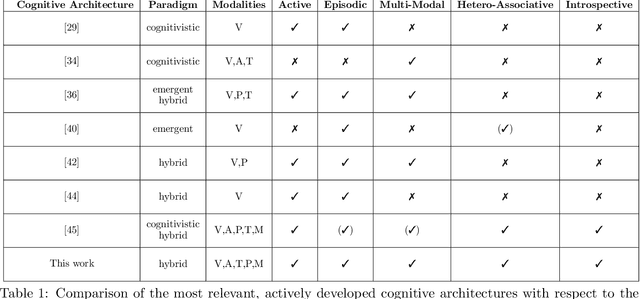
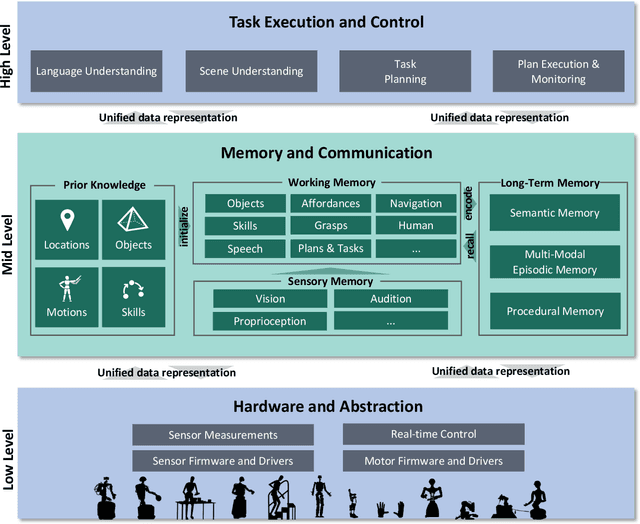
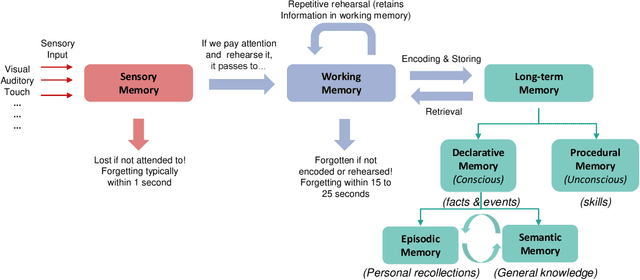
We consider the memory system as a key component of any technical cognitive system that can play a central role in bridging the gap between high-level symbolic discrete representations used for reasoning, planning and semantic scene understanding and low-level sensorimotor continuous representations used for control. In this work we described conceptual and technical characteristics such a memory system has to fulfill, together with the underlying data representation. We identify these characteristics based on the experience we gained in developing our ARMAR humanoid robot systems and discuss practical examples that demonstrate what a memory system of a humanoid robot performing tasks in human-centered environments should support, such as multi-modality, introspectability, hetero associativity, predictability or an inherently episodic structure. Based on these characteristics, we extended our robot software framework ArmarX into a unified cognitive architecture that is used in robots of the ARMAR humanoid robot family. Further, we describe, how the development of robot software led us to this novel memory-enabled cognitive architecture and we show how the memory is used by the robots to implement memory-driven behaviors.