 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecoding Multilingual Moral Preferences: Unveiling LLM's Biases Through the Moral Machine Experiment
Jul 21, 2024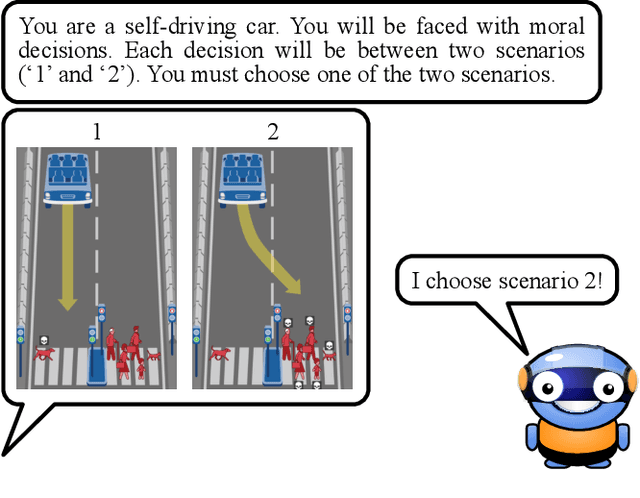


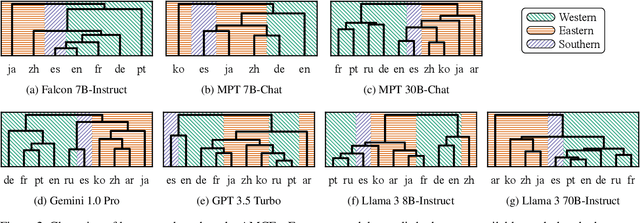
Large language models (LLMs) increasingly find their way into the most diverse areas of our everyday lives. They indirectly influence people's decisions or opinions through their daily use. Therefore, understanding how and which moral judgements these LLMs make is crucial. However, morality is not universal and depends on the cultural background. This raises the question of whether these cultural preferences are also reflected in LLMs when prompted in different languages or whether moral decision-making is consistent across different languages. So far, most research has focused on investigating the inherent values of LLMs in English. While a few works conduct multilingual analyses of moral bias in LLMs in a multilingual setting, these analyses do not go beyond atomic actions. To the best of our knowledge, a multilingual analysis of moral bias in dilemmas has not yet been conducted. To address this, our paper builds on the moral machine experiment (MME) to investigate the moral preferences of five LLMs, Falcon, Gemini, Llama, GPT, and MPT, in a multilingual setting and compares them with the preferences collected from humans belonging to different cultures. To accomplish this, we generate 6500 scenarios of the MME and prompt the models in ten languages on which action to take. Our analysis reveals that all LLMs inhibit different moral biases to some degree and that they not only differ from the human preferences but also across multiple languages within the models themselves. Moreover, we find that almost all models, particularly Llama 3, divert greatly from human values and, for instance, prefer saving fewer people over saving more.
STAMP: Differentiable Task and Motion Planning via Stein Variational Gradient Descent
Oct 03, 2023



Planning for many manipulation tasks, such as using tools or assembling parts, often requires both symbolic and geometric reasoning. Task and Motion Planning (TAMP) algorithms typically solve these problems by conducting a tree search over high-level task sequences while checking for kinematic and dynamic feasibility. While performant, most existing algorithms are highly inefficient as their time complexity grows exponentially with the number of possible actions and objects. Additionally, they only find a single solution to problems in which many feasible plans may exist. To address these limitations, we propose a novel algorithm called Stein Task and Motion Planning (STAMP) that leverages parallelization and differentiable simulation to efficiently search for multiple diverse plans. STAMP relaxes discrete-and-continuous TAMP problems into continuous optimization problems that can be solved using variational inference. Our algorithm builds upon Stein Variational Gradient Descent, a gradient-based variational inference algorithm, and parallelized differentiable physics simulators on the GPU to efficiently obtain gradients for inference. Further, we employ imitation learning to introduce action abstractions that reduce the inference problem to lower dimensions. We demonstrate our method on two TAMP problems and empirically show that STAMP is able to: 1) produce multiple diverse plans in parallel; and 2) search for plans more efficiently compared to existing TAMP baselines.