 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Integration and Improvement of Robotic Assembly using Skill Graph Representations
Mar 13, 2026Robotic assembly systems traditionally require substantial manual engineering effort to integrate new tasks, adapt to new environments, and improve performance over time. This paper presents a framework for autonomous integration and continuous improvement of robotic assembly systems based on Skill Graph representations. A Skill Graph organizes robot capabilities as verb-based skills, explicitly linking semantic descriptions (verbs and nouns) with executable policies, pre-conditions, post-conditions, and evaluators. We show how Skill Graphs enable rapid system integration by supporting semantic-level planning over skills, while simultaneously grounding execution through well-defined interfaces to robot controllers and perception modules. After initial deployment, the same Skill Graph structure supports systematic data collection and closed-loop performance improvement, enabling iterative refinement of skills and their composition. We demonstrate how this approach unifies system configuration, execution, evaluation, and learning within a single representation, providing a scalable pathway toward adaptive and reusable robotic assembly systems. The code is at https://github.com/intelligent-control-lab/AIDF.
Prompt-to-Product: Generative Assembly via Bimanual Manipulation
Aug 28, 2025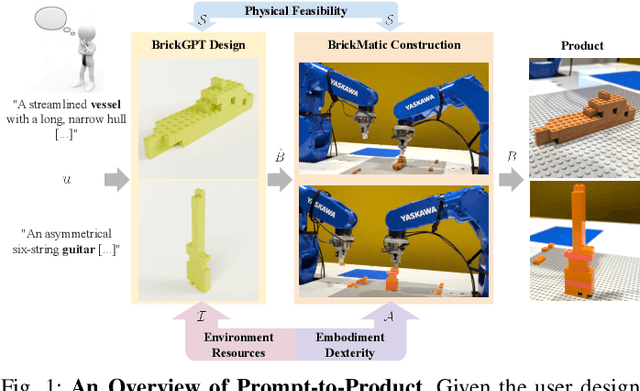
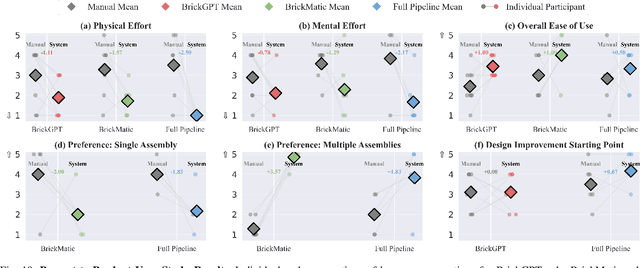
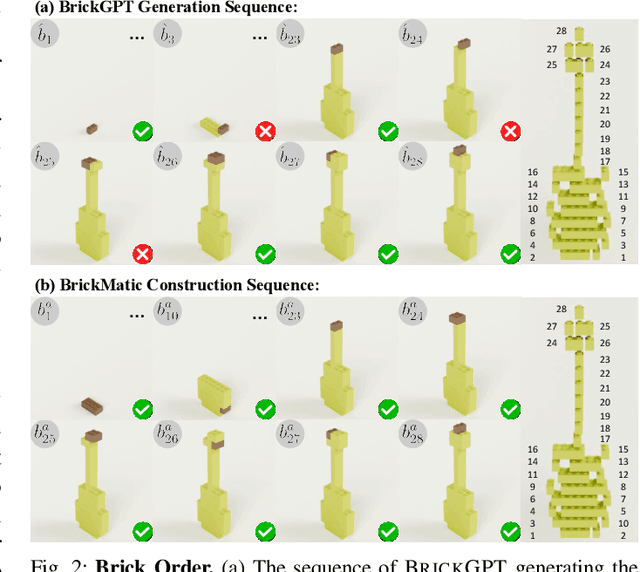
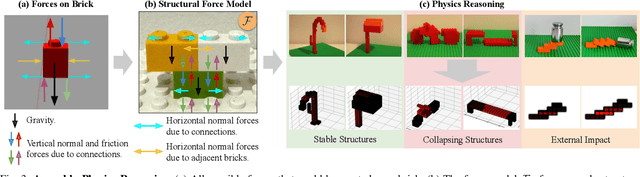
Creating assembly products demands significant manual effort and expert knowledge in 1) designing the assembly and 2) constructing the product. This paper introduces Prompt-to-Product, an automated pipeline that generates real-world assembly products from natural language prompts. Specifically, we leverage LEGO bricks as the assembly platform and automate the process of creating brick assembly structures. Given the user design requirements, Prompt-to-Product generates physically buildable brick designs, and then leverages a bimanual robotic system to construct the real assembly products, bringing user imaginations into the real world. We conduct a comprehensive user study, and the results demonstrate that Prompt-to-Product significantly lowers the barrier and reduces manual effort in creating assembly products from imaginative ideas.
Benchmarking Shortcutting Techniques for Multi-Robot-Arm Motion Planning
Aug 07, 2025Generating high-quality motion plans for multiple robot arms is challenging due to the high dimensionality of the system and the potential for inter-arm collisions. Traditional motion planning methods often produce motions that are suboptimal in terms of smoothness and execution time for multi-arm systems. Post-processing via shortcutting is a common approach to improve motion quality for efficient and smooth execution. However, in multi-arm scenarios, optimizing one arm's motion must not introduce collisions with other arms. Although existing multi-arm planning works often use some form of shortcutting techniques, their exact methodology and impact on performance are often vaguely described. In this work, we present a comprehensive study quantitatively comparing existing shortcutting methods for multi-arm trajectories across diverse simulated scenarios. We carefully analyze the pros and cons of each shortcutting method and propose two simple strategies for combining these methods to achieve the best performance-runtime tradeoff. Video, code, and dataset are available at https://philip-huang.github.io/mr-shortcut/.
APEX-MR: Multi-Robot Asynchronous Planning and Execution for Cooperative Assembly
Mar 20, 2025Compared to a single-robot workstation, a multi-robot system offers several advantages: 1) it expands the system's workspace, 2) improves task efficiency, and more importantly, 3) enables robots to achieve significantly more complex and dexterous tasks, such as cooperative assembly. However, coordinating the tasks and motions of multiple robots is challenging due to issues, e.g. system uncertainty, task efficiency, algorithm scalability, and safety concerns. To address these challenges, this paper studies multi-robot coordination and proposes APEX-MR, an asynchronous planning and execution framework designed to safely and efficiently coordinate multiple robots to achieve cooperative assembly, e.g. LEGO assembly. In particular, APEX-MR provides a systematic approach to post-process multi-robot tasks and motion plans to enable robust asynchronous execution under uncertainty. Experimental results demonstrate that APEX-MR can significantly speed up the execution time of many long-horizon LEGO assembly tasks by 48% compared to sequential planning and 36% compared to synchronous planning on average. To further demonstrate the performance, we deploy APEX-MR to a dual-arm system to perform physical LEGO assembly. To our knowledge, this is the first robotic system capable of performing customized LEGO assembly using commercial LEGO bricks. The experiment results demonstrate that the dual-arm system, with APEX-MR, can safely coordinate robot motions, efficiently collaborate, and construct complex LEGO structures. Our project website is available at https://intelligent-control-lab.github.io/APEX-MR/
STAMP: Differentiable Task and Motion Planning via Stein Variational Gradient Descent
Oct 03, 2023



Planning for many manipulation tasks, such as using tools or assembling parts, often requires both symbolic and geometric reasoning. Task and Motion Planning (TAMP) algorithms typically solve these problems by conducting a tree search over high-level task sequences while checking for kinematic and dynamic feasibility. While performant, most existing algorithms are highly inefficient as their time complexity grows exponentially with the number of possible actions and objects. Additionally, they only find a single solution to problems in which many feasible plans may exist. To address these limitations, we propose a novel algorithm called Stein Task and Motion Planning (STAMP) that leverages parallelization and differentiable simulation to efficiently search for multiple diverse plans. STAMP relaxes discrete-and-continuous TAMP problems into continuous optimization problems that can be solved using variational inference. Our algorithm builds upon Stein Variational Gradient Descent, a gradient-based variational inference algorithm, and parallelized differentiable physics simulators on the GPU to efficiently obtain gradients for inference. Further, we employ imitation learning to introduce action abstractions that reduce the inference problem to lower dimensions. We demonstrate our method on two TAMP problems and empirically show that STAMP is able to: 1) produce multiple diverse plans in parallel; and 2) search for plans more efficiently compared to existing TAMP baselines.