 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy-Efficient Quantized Federated Learning for Resource-constrained IoT devices
Sep 16, 2025Federated Learning (FL) has emerged as a promising paradigm for enabling collaborative machine learning while preserving data privacy, making it particularly suitable for Internet of Things (IoT) environments. However, resource-constrained IoT devices face significant challenges due to limited energy,unreliable communication channels, and the impracticality of assuming infinite blocklength transmission. This paper proposes a federated learning framework for IoT networks that integrates finite blocklength transmission, model quantization, and an error-aware aggregation mechanism to enhance energy efficiency and communication reliability. The framework also optimizes uplink transmission power to balance energy savings and model performance. Simulation results demonstrate that the proposed approach significantly reduces energy consumption by up to 75\% compared to a standard FL model, while maintaining robust model accuracy, making it a viable solution for FL in real-world IoT scenarios with constrained resources. This work paves the way for efficient and reliable FL implementations in practical IoT deployments. Index Terms: Federated learning, IoT, finite blocklength, quantization, energy efficiency.
Exact Sum Distribution of alpha-eta-kappa-mu Fading Channels for Statistical Performance Analysis of RRS-Based Wireless Transmission
Feb 18, 2025Reconfigurable refractive surface (RRS) is an efficient alternative to holographic multiple input multiple outputs (HMIMO) systems that can serve as a transmission unit operating in the signal refraction mode. RRS transmissions experience near-field propagation due to the proximity of the transmission feed and far-field propagation for the user located farther from the transmitting unit. There is limited research on the effect of channel fading on far-field users in RRS-based transmissions. In this paper, we conduct an exact statistical analysis of RRS-based transmission considering alpha-eta-kappa-mu fading model for the far-field user and the near-field effect of transmission feed. First, we show the exact statistical analysis for the RRS transmission over alpha-eta-kappa-mu fading model consisting of multiple infinite-series representations with multivariate Fox-H function. Next, we develop a novel approach to derive the density and distribution functions for the resultant fading channel of the RRS system in terms of multivariate Fox-H functions without involving infinite series approximations for tractable performance analysis. We present the exact outage probability and average bit-error-rate (BER) performance of single-element and multiple-element RRS systems to validate the proposed analysis further. We also obtain the diversity order of the system by analyzing the outage probability at a high signal-to-noise ratio (SNR). Computer simulations demonstrate the relevance of the developed statistical results for RRS-based wireless systems over the generalized fading model for a comprehensive performance evaluation.
A Conditional Tabular GAN-Enhanced Intrusion Detection System for Rare Attacks in IoT Networks
Feb 09, 2025Internet of things (IoT) networks, boosted by 6G technology, are transforming various industries. However, their widespread adoption introduces significant security risks, particularly in detecting rare but potentially damaging cyber-attacks. This makes the development of robust IDS crucial for monitoring network traffic and ensuring their safety. Traditional IDS often struggle with detecting rare attacks due to severe class imbalances in IoT data. In this paper, we propose a novel two-stage system called conditional tabular generative synthetic minority data generation with deep neural network (CTGSM-DNN). In the first stage, a conditional tabular generative adversarial network (CTGAN) is employed to generate synthetic data for rare attack classes. In the second stage, the SMOTEENN method is applied to improve dataset quality. The full study was conducted using the CSE-CIC-IDS2018 dataset, and we assessed the performance of the proposed IDS using different evaluation metrics. The experimental results demonstrated the effectiveness of the proposed multiclass classifier, achieving an overall accuracy of 99.90% and 80% accuracy in detecting rare attacks.
Energy-Efficient Flying LoRa Gateways: A Multi-Agent Reinforcement Learning Approach
Feb 05, 2025



With the rapid development of next-generation Internet of Things (NG-IoT) networks, the increasing number of connected devices has led to a surge in power consumption. This rise in energy demand poses significant challenges to resource availability and raises sustainability concerns for large-scale IoT deployments. Efficient energy utilization in communication networks, particularly for power-constrained IoT devices, has thus become a critical area of research. In this paper, we deployed flying LoRa gateways (GWs) mounted on unmanned aerial vehicles (UAVs) to collect data from LoRa end devices (EDs) and transmit it to a central server. Our primary objective is to maximize the global system energy efficiency (EE) of wireless LoRa networks by joint optimization of transmission power (TP), spreading factor (SF), bandwidth (W), and ED association. To solve this challenging problem, we model the problem as a partially observable Markov decision process (POMDP), where each flying LoRa GW acts as a learning agent using a cooperative Multi-Agent Reinforcement Learning (MARL) approach under centralized training and decentralized execution (CTDE). Simulation results demonstrate that our proposed method, based on the multi-agent proximal policy optimization (MAPPO) algorithm, significantly improves the global system EE and surpasses the conventional MARL schemes.
Joint Adaptive OFDM and Reinforcement Learning Design for Autonomous Vehicles: Leveraging Age of Updates
Dec 24, 2024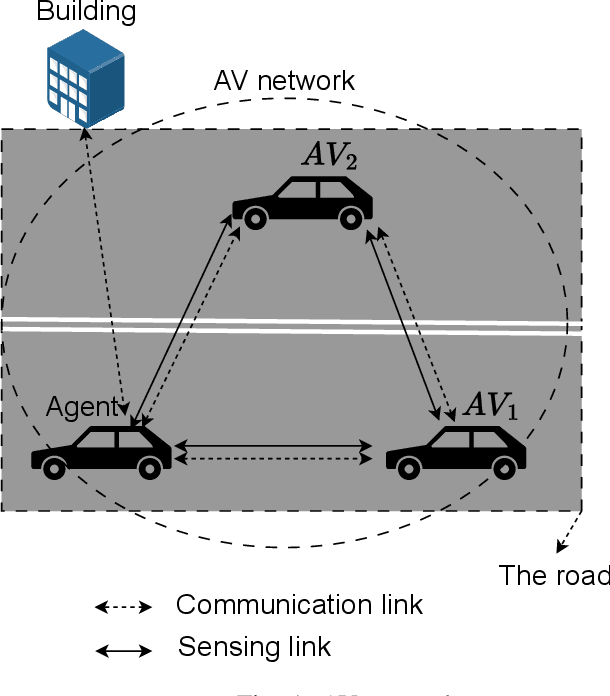
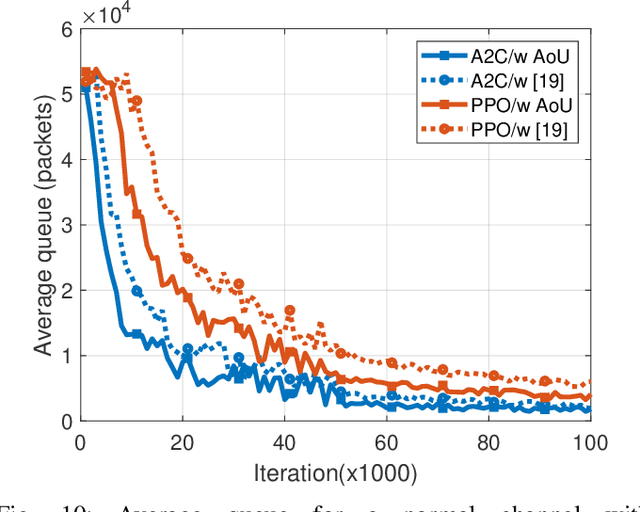
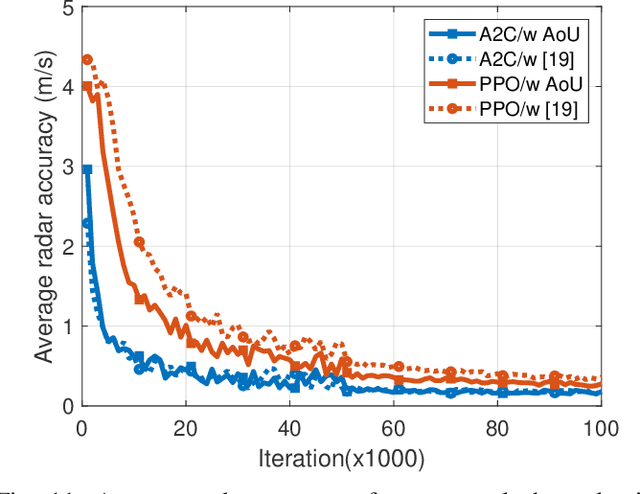
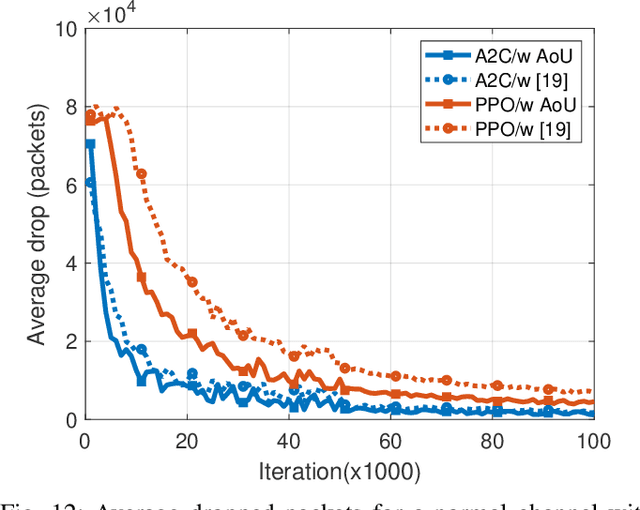
Millimeter wave (mmWave)-based orthogonal frequency-division multiplexing (OFDM) stands out as a suitable alternative for high-resolution sensing and high-speed data transmission. To meet communication and sensing requirements, many works propose a static configuration where the wave's hyperparameters such as the number of symbols in a frame and the number of frames in a communication slot are already predefined. However, two facts oblige us to redefine the problem, (1) the environment is often dynamic and uncertain, and (2) mmWave is severely impacted by wireless environments. A striking example where this challenge is very prominent is autonomous vehicle (AV). Such a system leverages integrated sensing and communication (ISAC) using mmWave to manage data transmission and the dynamism of the environment. In this work, we consider an autonomous vehicle network where an AV utilizes its queue state information (QSI) and channel state information (CSI) in conjunction with reinforcement learning techniques to manage communication and sensing. This enables the AV to achieve two primary objectives: establishing a stable communication link with other AVs and accurately estimating the velocities of surrounding objects with high resolution. The communication performance is therefore evaluated based on the queue state, the effective data rate, and the discarded packets rate. In contrast, the effectiveness of the sensing is assessed using the velocity resolution. In addition, we exploit adaptive OFDM techniques for dynamic modulation, and we suggest a reward function that leverages the age of updates to handle the communication buffer and improve sensing. The system is validated using advantage actor-critic (A2C) and proximal policy optimization (PPO). Furthermore, we compare our solution with the existing design and demonstrate its superior performance by computer simulations.
MetaGraphLoc: A Graph-based Meta-learning Scheme for Indoor Localization via Sensor Fusion
Nov 26, 2024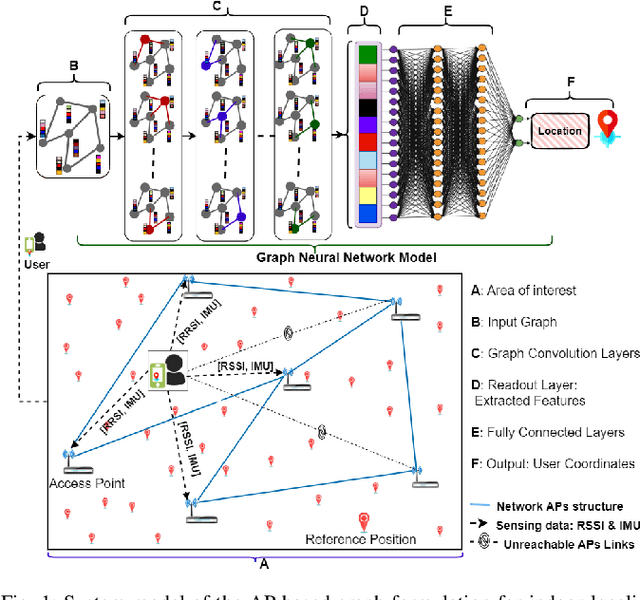
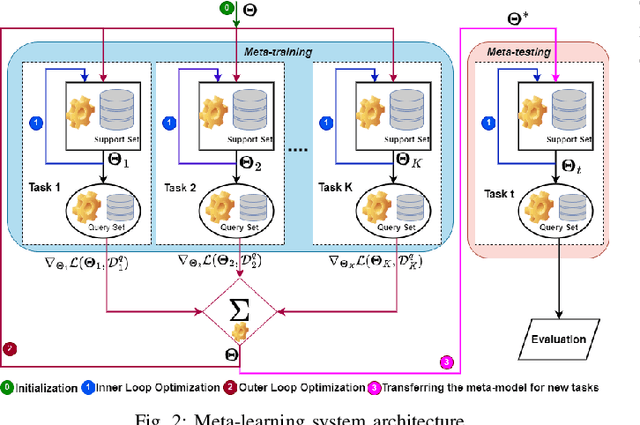
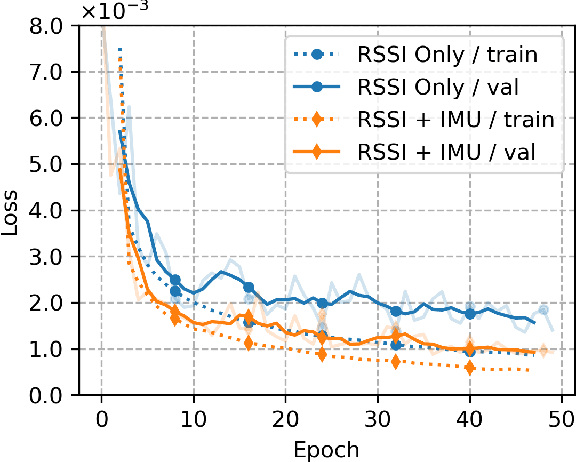
Accurate indoor localization remains challenging due to variations in wireless signal environments and limited data availability. This paper introduces MetaGraphLoc, a novel system leveraging sensor fusion, graph neural networks (GNNs), and meta-learning to overcome these limitations. MetaGraphLoc integrates received signal strength indicator measurements with inertial measurement unit data to enhance localization accuracy. Our proposed GNN architecture, featuring dynamic edge construction (DEC), captures the spatial relationships between access points and underlying data patterns. MetaGraphLoc employs a meta-learning framework to adapt the GNN model to new environments with minimal data collection, significantly reducing calibration efforts. Extensive evaluations demonstrate the effectiveness of MetaGraphLoc. Data fusion reduces localization error by 15.92%, underscoring its importance. The GNN with DEC outperforms traditional deep neural networks by up to 30.89%, considering accuracy. Furthermore, the meta-learning approach enables efficient adaptation to new environments, minimizing data collection requirements. These advancements position MetaGraphLoc as a promising solution for indoor localization, paving the way for improved navigation and location-based services in the ever-evolving Internet of Things networks.
Optimal Joint Radar and Communication User Association in Cell-Free mMIMO Systems
Aug 27, 2024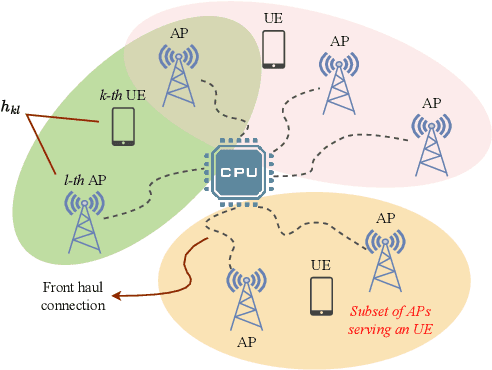
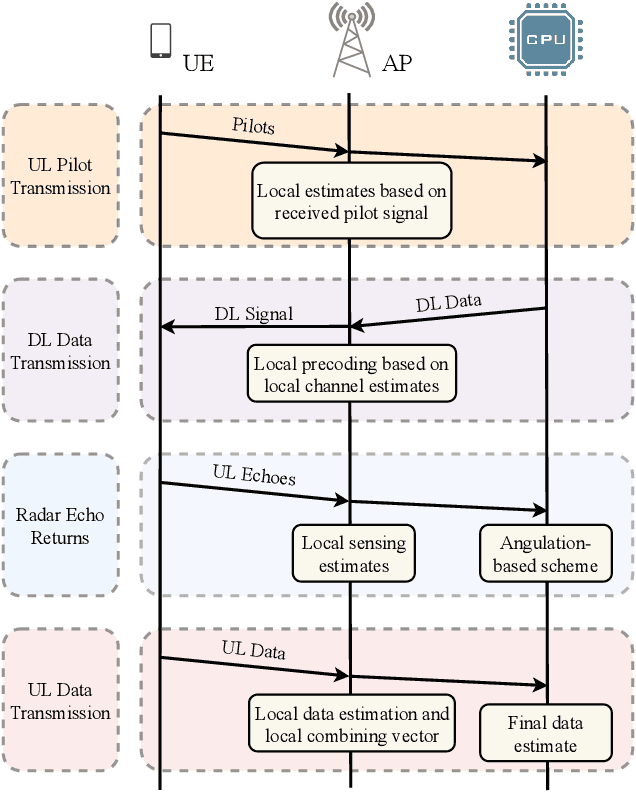

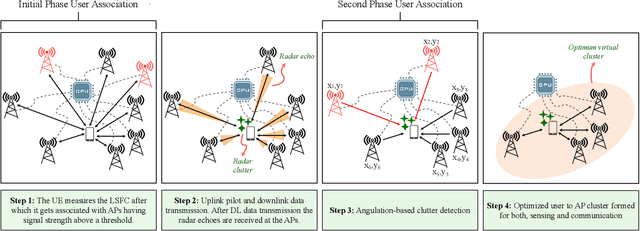
The cell-free massive multiple-input multiple-output (CF-mMIMO) systems are crucial for 6G development due to their high spectral efficiency and uniform user-experienced data rates. A key aspect of CF-mMIMO is user association (UA) and optimal cluster formation. Traditional methods focusing solely on communication-related metrics fall short in this context, as sensing is becoming integral to 6G. This study delves into a framework for joint radar and communication (JRC) in CF-mMIMO systems and investigates JRC-based UA techniques. We propose a novel method to optimize UA, enhancing both communication spectral efficiency and sensing accuracy. Existing literature has not explored this dual requirement integration for UA. Our proposed two-step scheme optimizes UA clusters for both communication and sensing. The first step involves selecting access points (APs) based on channel quality, followed by a second step that further refines the selection by choosing APs from the initial group that are also optimal for sensing. We utilize the signal-clutter plus noise ratio to exclude APs with clutter in front of the user equipment (UE) and the AP view angle, ensuring that radar echoes are received only from the specific UE, not the surrounding clutter. Theoretical analysis and simulations demonstrate that the same APs optimized for communication are not necessarily optimal for sensing, highlighting the need for schemes that incorporate sensing requirements in UA. The results show the effectiveness of the proposed method, showing its potential to improve CF-mMIMO system performance in JRC scenarios.
Enhanced Intrusion Detection System for Multiclass Classification in UAV Networks
Jun 14, 2024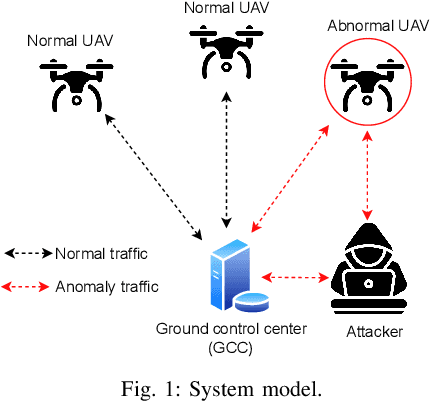
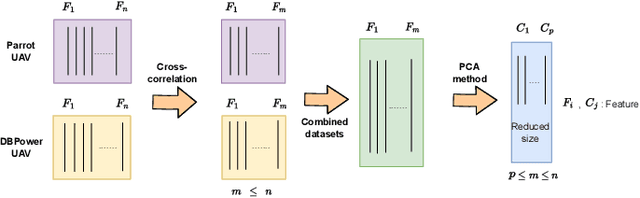
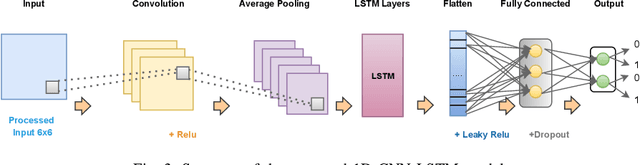
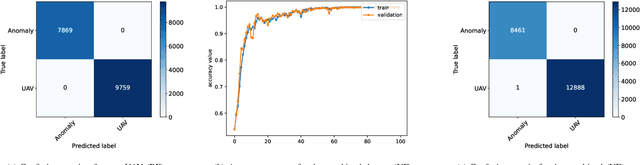
Unmanned Aerial Vehicles (UAVs) have become increasingly popular in various applications, especially with the emergence of 6G systems and networks. However, their widespread adoption has also led to concerns regarding security vulnerabilities, making the development of reliable intrusion detection systems (IDS) essential for ensuring UAVs safety and mission success. This paper presents a new IDS for UAV networks. A binary-tuple representation was used for encoding class labels, along with a deep learning-based approach employed for classification. The proposed system enhances the intrusion detection by capturing complex class relationships and temporal network patterns. Moreover, a cross-correlation study between common features of different UAVs was conducted to discard correlated features that might mislead the classification of the proposed IDS. The full study was carried out using the UAV-IDS-2020 dataset, and we assessed the performance of the proposed IDS using different evaluation metrics. The experimental results highlighted the effectiveness of the proposed multiclass classifier model with an accuracy of 95%.
FeMLoc: Federated Meta-learning for Adaptive Wireless Indoor Localization Tasks in IoT Networks
May 17, 2024



The rapid growth of the Internet of Things fosters collaboration among connected devices for tasks like indoor localization. However, existing indoor localization solutions struggle with dynamic and harsh conditions, requiring extensive data collection and environment-specific calibration. These factors impede cooperation, scalability, and the utilization of prior research efforts. To address these challenges, we propose FeMLoc, a federated meta-learning framework for localization. FeMLoc operates in two stages: (i) collaborative meta-training where a global meta-model is created by training on diverse localization datasets from edge devices. (ii) Rapid adaptation for new environments, where the pre-trained global meta-model initializes the localization model, requiring only minimal fine-tuning with a small amount of new data. In this paper, we provide a detailed technical overview of FeMLoc, highlighting its unique approach to privacy-preserving meta-learning in the context of indoor localization. Our performance evaluation demonstrates the superiority of FeMLoc over state-of-the-art methods, enabling swift adaptation to new indoor environments with reduced calibration effort. Specifically, FeMLoc achieves up to 80.95% improvement in localization accuracy compared to the conventional baseline neural network (NN) approach after only 100 gradient steps. Alternatively, for a target accuracy of around 5m, FeMLoc achieves the same level of accuracy up to 82.21% faster than the baseline NN approach. This translates to FeMLoc requiring fewer training iterations, thereby significantly reducing fingerprint data collection and calibration efforts. Moreover, FeMLoc exhibits enhanced scalability, making it well-suited for location-aware massive connectivity driven by emerging wireless communication technologies.
A Unified Deep Transfer Learning Model for Accurate IoT Localization in Diverse Environments
May 16, 2024



Internet of Things (IoT) is an ever-evolving technological paradigm that is reshaping industries and societies globally. Real-time data collection, analysis, and decision-making facilitated by localization solutions form the foundation for location-based services, enabling them to support critical functions within diverse IoT ecosystems. However, most existing works on localization focus on single environment, resulting in the development of multiple models to support multiple environments. In the context of smart cities, these raise costs and complexity due to the dynamicity of such environments. To address these challenges, this paper presents a unified indoor-outdoor localization solution that leverages transfer learning (TL) schemes to build a single deep learning model. The model accurately predicts the localization of IoT devices in diverse environments. The performance evaluation shows that by adopting an encoder-based TL scheme, we can improve the baseline model by about 17.18% in indoor environments and 9.79% in outdoor environments.