 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Privacy-Preserving Indoor Localization System based on Hierarchical Federated Learning
Jul 02, 2025Location information serves as the fundamental element for numerous Internet of Things (IoT) applications. Traditional indoor localization techniques often produce significant errors and raise privacy concerns due to centralized data collection. In response, Machine Learning (ML) techniques offer promising solutions by capturing indoor environment variations. However, they typically require central data aggregation, leading to privacy, bandwidth, and server reliability issues. To overcome these challenges, in this paper, we propose a Federated Learning (FL)-based approach for dynamic indoor localization using a Deep Neural Network (DNN) model. Experimental results show that FL has the nearby performance to Centralized Model (CL) while keeping the data privacy, bandwidth efficiency and server reliability. This research demonstrates that our proposed FL approach provides a viable solution for privacy-enhanced indoor localization, paving the way for advancements in secure and efficient indoor localization systems.
Transfer Learning for VLC-based indoor Localization: Addressing Environmental Variability
Jul 02, 2025Accurate indoor localization is crucial in industrial environments. Visible Light Communication (VLC) has emerged as a promising solution, offering high accuracy, energy efficiency, and minimal electromagnetic interference. However, VLC-based indoor localization faces challenges due to environmental variability, such as lighting fluctuations and obstacles. To address these challenges, we propose a Transfer Learning (TL)-based approach for VLC-based indoor localization. Using real-world data collected at a BOSCH factory, the TL framework integrates a deep neural network (DNN) to improve localization accuracy by 47\%, reduce energy consumption by 32\%, and decrease computational time by 40\% compared to the conventional models. The proposed solution is highly adaptable under varying environmental conditions and achieves similar accuracy with only 30\% of the dataset, making it a cost-efficient and scalable option for industrial applications in Industry 4.0.
MetaGraphLoc: A Graph-based Meta-learning Scheme for Indoor Localization via Sensor Fusion
Nov 26, 2024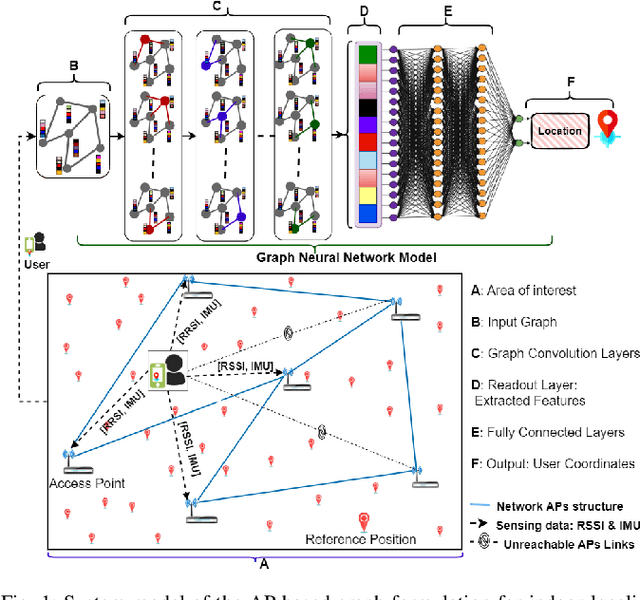
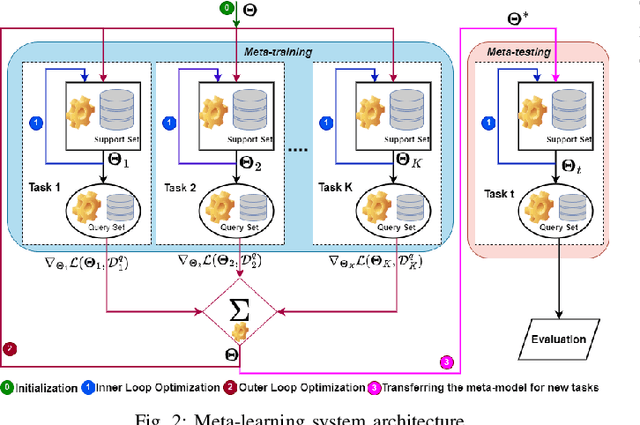
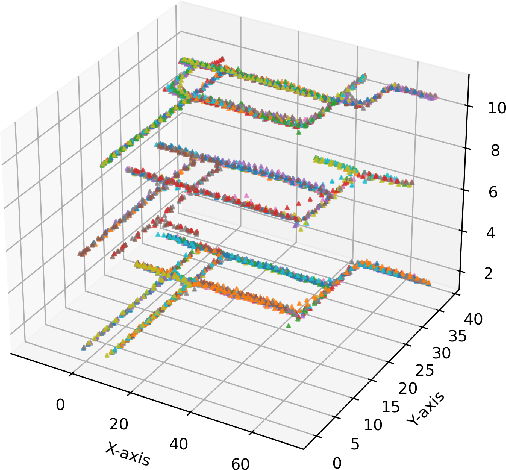
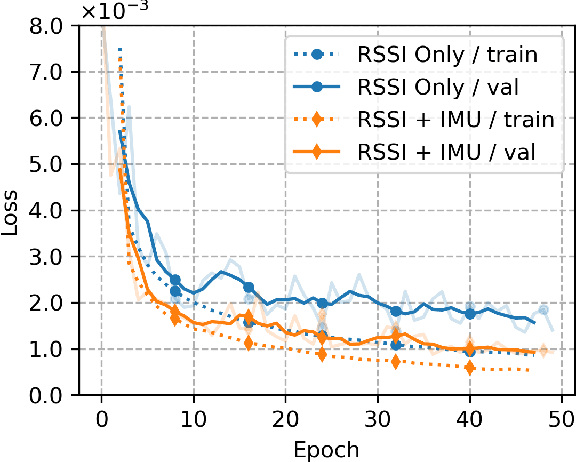
Accurate indoor localization remains challenging due to variations in wireless signal environments and limited data availability. This paper introduces MetaGraphLoc, a novel system leveraging sensor fusion, graph neural networks (GNNs), and meta-learning to overcome these limitations. MetaGraphLoc integrates received signal strength indicator measurements with inertial measurement unit data to enhance localization accuracy. Our proposed GNN architecture, featuring dynamic edge construction (DEC), captures the spatial relationships between access points and underlying data patterns. MetaGraphLoc employs a meta-learning framework to adapt the GNN model to new environments with minimal data collection, significantly reducing calibration efforts. Extensive evaluations demonstrate the effectiveness of MetaGraphLoc. Data fusion reduces localization error by 15.92%, underscoring its importance. The GNN with DEC outperforms traditional deep neural networks by up to 30.89%, considering accuracy. Furthermore, the meta-learning approach enables efficient adaptation to new environments, minimizing data collection requirements. These advancements position MetaGraphLoc as a promising solution for indoor localization, paving the way for improved navigation and location-based services in the ever-evolving Internet of Things networks.
FeMLoc: Federated Meta-learning for Adaptive Wireless Indoor Localization Tasks in IoT Networks
May 17, 2024



The rapid growth of the Internet of Things fosters collaboration among connected devices for tasks like indoor localization. However, existing indoor localization solutions struggle with dynamic and harsh conditions, requiring extensive data collection and environment-specific calibration. These factors impede cooperation, scalability, and the utilization of prior research efforts. To address these challenges, we propose FeMLoc, a federated meta-learning framework for localization. FeMLoc operates in two stages: (i) collaborative meta-training where a global meta-model is created by training on diverse localization datasets from edge devices. (ii) Rapid adaptation for new environments, where the pre-trained global meta-model initializes the localization model, requiring only minimal fine-tuning with a small amount of new data. In this paper, we provide a detailed technical overview of FeMLoc, highlighting its unique approach to privacy-preserving meta-learning in the context of indoor localization. Our performance evaluation demonstrates the superiority of FeMLoc over state-of-the-art methods, enabling swift adaptation to new indoor environments with reduced calibration effort. Specifically, FeMLoc achieves up to 80.95% improvement in localization accuracy compared to the conventional baseline neural network (NN) approach after only 100 gradient steps. Alternatively, for a target accuracy of around 5m, FeMLoc achieves the same level of accuracy up to 82.21% faster than the baseline NN approach. This translates to FeMLoc requiring fewer training iterations, thereby significantly reducing fingerprint data collection and calibration efforts. Moreover, FeMLoc exhibits enhanced scalability, making it well-suited for location-aware massive connectivity driven by emerging wireless communication technologies.
Federated Learning based Hierarchical 3D Indoor Localization
Mar 01, 2023The proliferation of connected devices in indoor environments opens the floor to a myriad of indoor applications with positioning services as key enablers. However, as privacy issues and resource constraints arise, it becomes more challenging to design accurate positioning systems as required by most applications. To overcome the latter challenges, we present in this paper, a federated learning (FL) framework for hierarchical 3D indoor localization using a deep neural network. Indeed, we firstly shed light on the prominence of exploiting the hierarchy between floors and buildings in a multi-building and multi-floor indoor environment. Then, we propose an FL framework to train the designed hierarchical model. The performance evaluation shows that by adopting a hierarchical learning scheme, we can improve the localization accuracy by up to 24.06% compared to the non-hierarchical approach. We also obtain a building and floor prediction accuracy of 99.90% and 94.87% respectively. With the proposed FL framework, we can achieve a near-performance characteristic as of the central training with an increase of only 7.69% in the localization error. Moreover, the conducted scalability study reveals that the FL system accuracy is improved when more devices join the training.