 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy-Efficient Quantized Federated Learning for Resource-constrained IoT devices
Sep 16, 2025Federated Learning (FL) has emerged as a promising paradigm for enabling collaborative machine learning while preserving data privacy, making it particularly suitable for Internet of Things (IoT) environments. However, resource-constrained IoT devices face significant challenges due to limited energy,unreliable communication channels, and the impracticality of assuming infinite blocklength transmission. This paper proposes a federated learning framework for IoT networks that integrates finite blocklength transmission, model quantization, and an error-aware aggregation mechanism to enhance energy efficiency and communication reliability. The framework also optimizes uplink transmission power to balance energy savings and model performance. Simulation results demonstrate that the proposed approach significantly reduces energy consumption by up to 75\% compared to a standard FL model, while maintaining robust model accuracy, making it a viable solution for FL in real-world IoT scenarios with constrained resources. This work paves the way for efficient and reliable FL implementations in practical IoT deployments. Index Terms: Federated learning, IoT, finite blocklength, quantization, energy efficiency.
MetaGraphLoc: A Graph-based Meta-learning Scheme for Indoor Localization via Sensor Fusion
Nov 26, 2024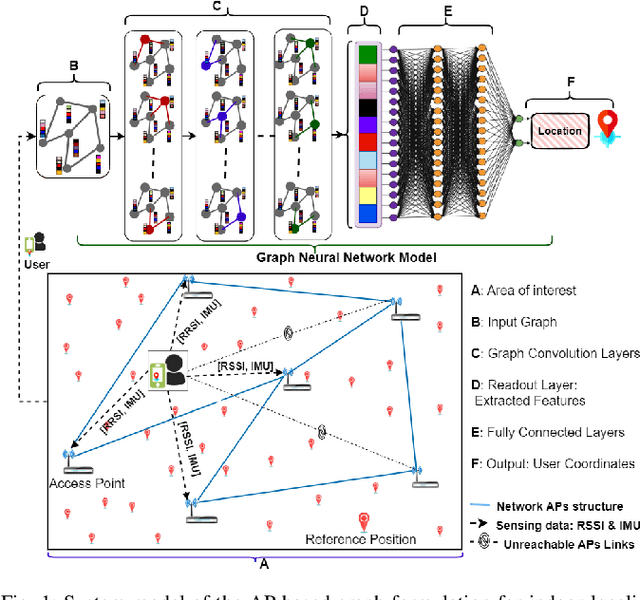
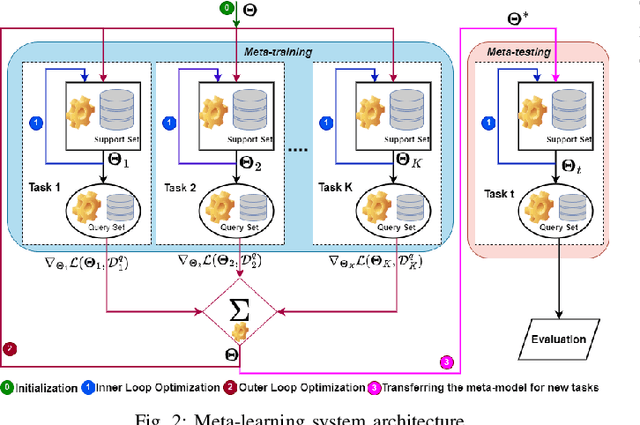
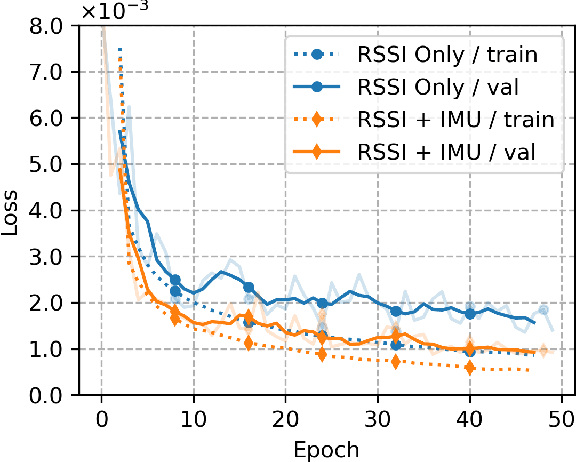
Accurate indoor localization remains challenging due to variations in wireless signal environments and limited data availability. This paper introduces MetaGraphLoc, a novel system leveraging sensor fusion, graph neural networks (GNNs), and meta-learning to overcome these limitations. MetaGraphLoc integrates received signal strength indicator measurements with inertial measurement unit data to enhance localization accuracy. Our proposed GNN architecture, featuring dynamic edge construction (DEC), captures the spatial relationships between access points and underlying data patterns. MetaGraphLoc employs a meta-learning framework to adapt the GNN model to new environments with minimal data collection, significantly reducing calibration efforts. Extensive evaluations demonstrate the effectiveness of MetaGraphLoc. Data fusion reduces localization error by 15.92%, underscoring its importance. The GNN with DEC outperforms traditional deep neural networks by up to 30.89%, considering accuracy. Furthermore, the meta-learning approach enables efficient adaptation to new environments, minimizing data collection requirements. These advancements position MetaGraphLoc as a promising solution for indoor localization, paving the way for improved navigation and location-based services in the ever-evolving Internet of Things networks.
FeMLoc: Federated Meta-learning for Adaptive Wireless Indoor Localization Tasks in IoT Networks
May 17, 2024



The rapid growth of the Internet of Things fosters collaboration among connected devices for tasks like indoor localization. However, existing indoor localization solutions struggle with dynamic and harsh conditions, requiring extensive data collection and environment-specific calibration. These factors impede cooperation, scalability, and the utilization of prior research efforts. To address these challenges, we propose FeMLoc, a federated meta-learning framework for localization. FeMLoc operates in two stages: (i) collaborative meta-training where a global meta-model is created by training on diverse localization datasets from edge devices. (ii) Rapid adaptation for new environments, where the pre-trained global meta-model initializes the localization model, requiring only minimal fine-tuning with a small amount of new data. In this paper, we provide a detailed technical overview of FeMLoc, highlighting its unique approach to privacy-preserving meta-learning in the context of indoor localization. Our performance evaluation demonstrates the superiority of FeMLoc over state-of-the-art methods, enabling swift adaptation to new indoor environments with reduced calibration effort. Specifically, FeMLoc achieves up to 80.95% improvement in localization accuracy compared to the conventional baseline neural network (NN) approach after only 100 gradient steps. Alternatively, for a target accuracy of around 5m, FeMLoc achieves the same level of accuracy up to 82.21% faster than the baseline NN approach. This translates to FeMLoc requiring fewer training iterations, thereby significantly reducing fingerprint data collection and calibration efforts. Moreover, FeMLoc exhibits enhanced scalability, making it well-suited for location-aware massive connectivity driven by emerging wireless communication technologies.
A Unified Deep Transfer Learning Model for Accurate IoT Localization in Diverse Environments
May 16, 2024



Internet of Things (IoT) is an ever-evolving technological paradigm that is reshaping industries and societies globally. Real-time data collection, analysis, and decision-making facilitated by localization solutions form the foundation for location-based services, enabling them to support critical functions within diverse IoT ecosystems. However, most existing works on localization focus on single environment, resulting in the development of multiple models to support multiple environments. In the context of smart cities, these raise costs and complexity due to the dynamicity of such environments. To address these challenges, this paper presents a unified indoor-outdoor localization solution that leverages transfer learning (TL) schemes to build a single deep learning model. The model accurately predicts the localization of IoT devices in diverse environments. The performance evaluation shows that by adopting an encoder-based TL scheme, we can improve the baseline model by about 17.18% in indoor environments and 9.79% in outdoor environments.
Federated Learning based Hierarchical 3D Indoor Localization
Mar 01, 2023The proliferation of connected devices in indoor environments opens the floor to a myriad of indoor applications with positioning services as key enablers. However, as privacy issues and resource constraints arise, it becomes more challenging to design accurate positioning systems as required by most applications. To overcome the latter challenges, we present in this paper, a federated learning (FL) framework for hierarchical 3D indoor localization using a deep neural network. Indeed, we firstly shed light on the prominence of exploiting the hierarchy between floors and buildings in a multi-building and multi-floor indoor environment. Then, we propose an FL framework to train the designed hierarchical model. The performance evaluation shows that by adopting a hierarchical learning scheme, we can improve the localization accuracy by up to 24.06% compared to the non-hierarchical approach. We also obtain a building and floor prediction accuracy of 99.90% and 94.87% respectively. With the proposed FL framework, we can achieve a near-performance characteristic as of the central training with an increase of only 7.69% in the localization error. Moreover, the conducted scalability study reveals that the FL system accuracy is improved when more devices join the training.
Federated Distillation based Indoor Localization for IoT Networks
May 23, 2022



Federated distillation (FD) paradigm has been recently proposed as a promising alternative to federated learning (FL) especially in wireless sensor networks with limited communication resources. However, all state-of-the art FD algorithms are designed for only classification tasks and less attention has been given to regression tasks. In this work, we propose an FD framework that properly operates on regression learning problems. Afterwards, we present a use-case implementation by proposing an indoor localization system that shows a good trade-off communication load vs. accuracy compared to federated learning (FL) based indoor localization. With our proposed framework, we reduce the number of transmitted bits by up to 98%. Moreover, we show that the proposed framework is much more scalable than FL, thus more likely to cope with the expansion of wireless networks.
Spreading Factor and RSSI for Localization in LoRa Networks: A Deep Reinforcement Learning Approach
May 23, 2022

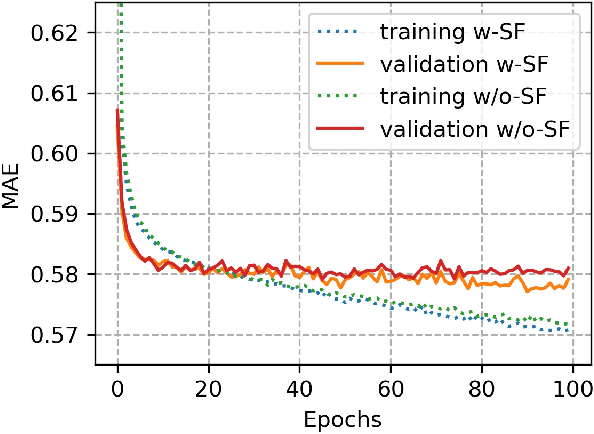
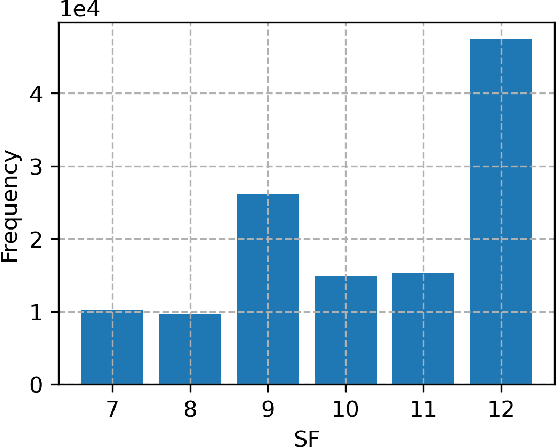
Recent advancements in Internet of Things (IoT) technologies have resulted in a tightening of requirements from various applications including localization in LoRa networks. To address the growing demand for LoRaWAN-powered IoT location-based services, accurate localization solutions are more crucial than ever. As such, in this work, we develop an accurate deep neural network based localization framework over a LoRa network by proposing a novel approach that builds the network radio map with the combination of RSSI recordings and the spreading factors (SF) used by LoRa devices during the transmissions. Then, we validate our framework using a publicly available experimental dataset recorded in an urban LoRa network. The performance evaluation shows the prominence of adding the spreading factor as an additional fingerprint, since we can achieve, by our approach, an improvement in localization accuracy by up to 6.67% compared to the state-of-the-art methods which employ uniquely the RSSI fingerprints. Additionally, we provide an analysis of the impact of the SF on the localization performance which reveals that the localization accuracy relies on the SF used for position request. Finally, we propose a deep reinforcement learning based localization system to capture the ever-growing complexity of LoRa networks environment and cope with the scalability issue in LoRa enabled massive IoT, and the results show an improvement of 63.3% in terms of accuracy.