 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoInfra: A Large-Scale Cooperative Infrastructure Perception System and Dataset in Adverse Weather
Jul 03, 2025We present CoInfra, a large-scale cooperative infrastructure perception system and dataset designed to advance robust multi-agent perception under real-world and adverse weather conditions. The CoInfra system includes 14 fully synchronized sensor nodes, each equipped with dual RGB cameras and a LiDAR, deployed across a shared region and operating continuously to capture all traffic participants in real-time. A robust, delay-aware synchronization protocol and a scalable system architecture that supports real-time data fusion, OTA management, and remote monitoring are provided in this paper. On the other hand, the dataset was collected in different weather scenarios, including sunny, rainy, freezing rain, and heavy snow and includes 195k LiDAR frames and 390k camera images from 8 infrastructure nodes that are globally time-aligned and spatially calibrated. Furthermore, comprehensive 3D bounding box annotations for five object classes (i.e., car, bus, truck, person, and bicycle) are provided in both global and individual node frames, along with high-definition maps for contextual understanding. Baseline experiments demonstrate the trade-offs between early and late fusion strategies, the significant benefits of HD map integration are discussed. By openly releasing our dataset, codebase, and system documentation at https://github.com/NingMingHao/CoInfra, we aim to enable reproducible research and drive progress in infrastructure-supported autonomous driving, particularly in challenging, real-world settings.
Real-World Deployment of Cloud Autonomous Mobility System Using 5G Networks for Outdoor and Indoor Environments
May 27, 2025The growing complexity of both outdoor and indoor mobility systems demands scalable, cost-effective, and reliable perception and communication frameworks. This work presents the real-world deployment and evaluation of a Cloud Autonomous Mobility (CAM) system that leverages distributed sensor nodes connected via 5G networks, which integrates LiDAR- and camera-based perception at infrastructure units, cloud computing for global information fusion, and Ultra-Reliable Low Latency Communications (URLLC) to enable real-time situational awareness and autonomous operation. The CAM system is deployed in two distinct environments: a dense urban roundabout and a narrow indoor hospital corridor. Field experiments show improved traffic monitoring, hazard detection, and asset management capabilities. The paper also discusses practical deployment challenges and shares key insights for scaling CAM systems. The results highlight the potential of cloud-based infrastructure perception to advance both outdoor and indoor intelligent transportation systems.
SAP-CoPE: Social-Aware Planning using Cooperative Pose Estimation with Infrastructure Sensor Nodes
Apr 08, 2025



Autonomous driving systems must operate safely in human-populated indoor environments, where challenges such as limited perception and occlusion sensitivity arise when relying solely on onboard sensors. These factors generate difficulties in the accurate recognition of human intentions and the generation of comfortable, socially aware trajectories. To address these issues, we propose SAP-CoPE, a social-aware planning framework that integrates cooperative infrastructure with a novel 3D human pose estimation method and a model predictive control-based controller. This real-time framework formulates an optimization problem that accounts for uncertainty propagation in the camera projection matrix while ensuring human joint coherence. The proposed method is adaptable to single- or multi-camera configurations and can incorporate sparse LiDAR point-cloud data. To enhance safety and comfort in human environments, we integrate a human personal space field based on human pose into a model predictive controller, enabling the system to navigate while avoiding discomfort zones. Extensive evaluations in both simulated and real-world settings demonstrate the effectiveness of our approach in generating socially aware trajectories for autonomous systems.
Enhancing Indoor Mobility with Connected Sensor Nodes: A Real-Time, Delay-Aware Cooperative Perception Approach
Nov 04, 2024



This paper presents a novel real-time, delay-aware cooperative perception system designed for intelligent mobility platforms operating in dynamic indoor environments. The system contains a network of multi-modal sensor nodes and a central node that collectively provide perception services to mobility platforms. The proposed Hierarchical Clustering Considering the Scanning Pattern and Ground Contacting Feature based Lidar Camera Fusion improve intra-node perception for crowded environment. The system also features delay-aware global perception to synchronize and aggregate data across nodes. To validate our approach, we introduced the Indoor Pedestrian Tracking dataset, compiled from data captured by two indoor sensor nodes. Our experiments, compared to baselines, demonstrate significant improvements in detection accuracy and robustness against delays. The dataset is available in the repository: https://github.com/NingMingHao/MVSLab-IndoorCooperativePerception
Intelligent Mobility System with Integrated Motion Planning and Control Utilizing Infrastructure Sensor Nodes
Oct 29, 2024



This paper introduces a framework for an indoor autonomous mobility system that can perform patient transfers and materials handling. Unlike traditional systems that rely on onboard perception sensors, the proposed approach leverages a global perception and localization (PL) through Infrastructure Sensor Nodes (ISNs) and cloud computing technology. Using the global PL, an integrated Model Predictive Control (MPC)-based local planning and tracking controller augmented with Artificial Potential Field (APF) is developed, enabling reliable and efficient motion planning and obstacle avoidance ability while tracking predefined reference motions. Simulation results demonstrate the effectiveness of the proposed MPC controller in smoothly navigating around both static and dynamic obstacles. The proposed system has the potential to extend to intelligent connected autonomous vehicles, such as electric or cargo transport vehicles with four-wheel independent drive/steering (4WID-4WIS) configurations.
An Efficient Approach to Generate Safe Drivable Space by LiDAR-Camera-HDmap Fusion
Oct 29, 2024



In this paper, we propose an accurate and robust perception module for Autonomous Vehicles (AVs) for drivable space extraction. Perception is crucial in autonomous driving, where many deep learning-based methods, while accurate on benchmark datasets, fail to generalize effectively, especially in diverse and unpredictable environments. Our work introduces a robust easy-to-generalize perception module that leverages LiDAR, camera, and HD map data fusion to deliver a safe and reliable drivable space in all weather conditions. We present an adaptive ground removal and curb detection method integrated with HD map data for enhanced obstacle detection reliability. Additionally, we propose an adaptive DBSCAN clustering algorithm optimized for precipitation noise, and a cost-effective LiDAR-camera frustum association that is resilient to calibration discrepancies. Our comprehensive drivable space representation incorporates all perception data, ensuring compatibility with vehicle dimensions and road regulations. This approach not only improves generalization and efficiency, but also significantly enhances safety in autonomous vehicle operations. Our approach is tested on a real dataset and its reliability is verified during the daily (including harsh snowy weather) operation of our autonomous shuttle, WATonoBus
WATonoBus: An All Weather Autonomous Shuttle
Dec 01, 2023



Autonomous vehicle all-weather operation poses significant challenges, encompassing modules from perception and decision-making to path planning and control. The complexity arises from the need to address adverse weather conditions like rain, snow, and fog across the autonomy stack. Conventional model-based and single-module approaches often lack holistic integration with upstream or downstream tasks. We tackle this problem by proposing a multi-module and modular system architecture with considerations for adverse weather across the perception level, through features such as snow covered curb detection, to decision-making and safety monitoring. Through daily weekday service on the WATonoBus platform for almost a year, we demonstrate that our proposed approach is capable of addressing adverse weather conditions and provide valuable learning from edge cases observed during operation.
Navigating A Mobile Robot Using Switching Distributed Sensor Networks
Jun 25, 2021

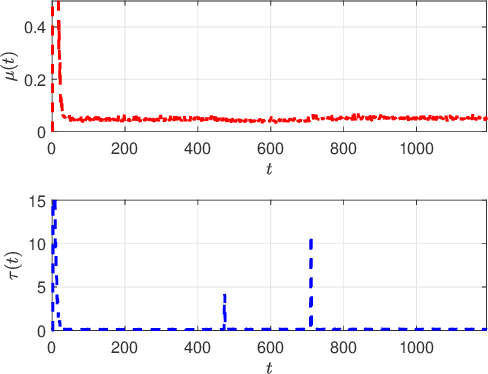
This paper proposes a method to navigate a mobile robot by estimating its state over a number of distributed sensor networks (DSNs) such that it can successively accomplish a sequence of tasks, i.e., its state enters each targeted set and stays inside no less than the desired time, under a resource-aware, time-efficient, and computation- and communication-constrained setting.We propose a new robot state estimation and navigation architecture, which integrates an event-triggered task-switching feedback controller for the robot and a two-time-scale distributed state estimator for each sensor. The architecture has three major advantages over existing approaches: First, in each task only one DSN is active for sensing and estimating the robot state, and for different tasks the robot can switch the active DSN by taking resource saving and system performance into account; Second, the robot only needs to communicate with one active sensor at each time to obtain its state information from the active DSN; Third, no online optimization is required. With the controller, the robot is able to accomplish a task by following a reference trajectory and switch to the next task when an event-triggered condition is fulfilled. With the estimator, each active sensor is able to estimate the robot state. Under proper conditions, we prove that the state estimation error and the trajectory tracking deviation are upper bounded by two time-varying sequences respectively, which play an essential role in the event-triggered condition. Furthermore, we find a sufficient condition for accomplishing a task and provide an upper bound of running time for the task. Numerical simulations of an indoor robot's localization and navigation are provided to validate the proposed architecture.
Soft Constrained Autonomous Vehicle Navigation using Gaussian Processes and Instance Segmentation
Jan 18, 2021
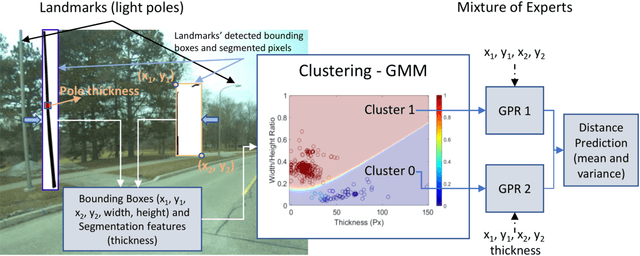

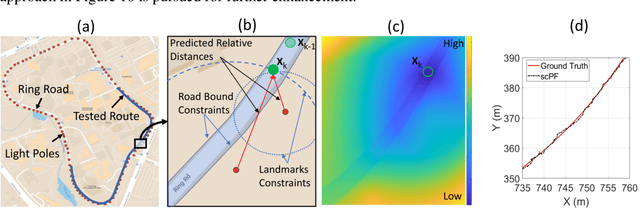
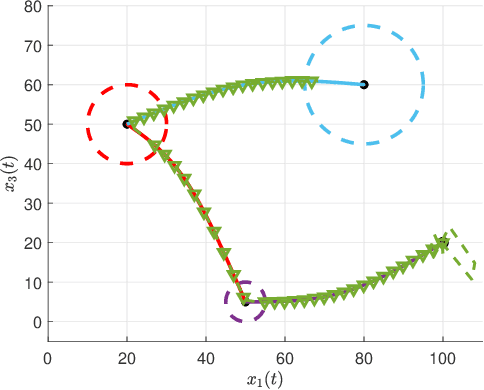
This paper presents a generic feature-based navigation framework for autonomous vehicles using a soft constrained Particle Filter. Selected map features, such as road and landmark locations, and vehicle states are used for designing soft constraints. After obtaining features of mapped landmarks in instance-based segmented images acquired from a monocular camera, vehicle-to-landmark distances are predicted using Gaussian Process Regression (GPR) models in a mixture of experts approach. Both mean and variance outputs of GPR models are used for implementing adaptive constraints. Experimental results confirm that the use of image segmentation features improves the vehicle-to-landmark distance prediction notably, and that the proposed soft constrained approach reliably localizes the vehicle even with reduced number of landmarks and noisy observations.