 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Constrained Autonomous Vehicle Navigation using Gaussian Processes and Instance Segmentation
Paper and Code
Jan 18, 2021
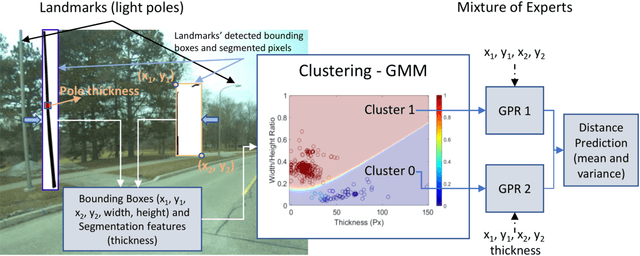

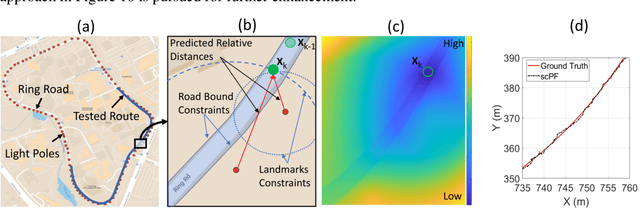
This paper presents a generic feature-based navigation framework for autonomous vehicles using a soft constrained Particle Filter. Selected map features, such as road and landmark locations, and vehicle states are used for designing soft constraints. After obtaining features of mapped landmarks in instance-based segmented images acquired from a monocular camera, vehicle-to-landmark distances are predicted using Gaussian Process Regression (GPR) models in a mixture of experts approach. Both mean and variance outputs of GPR models are used for implementing adaptive constraints. Experimental results confirm that the use of image segmentation features improves the vehicle-to-landmark distance prediction notably, and that the proposed soft constrained approach reliably localizes the vehicle even with reduced number of landmarks and noisy observations.