 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBody Transformer: Leveraging Robot Embodiment for Policy Learning
Aug 12, 2024



In recent years, the transformer architecture has become the de facto standard for machine learning algorithms applied to natural language processing and computer vision. Despite notable evidence of successful deployment of this architecture in the context of robot learning, we claim that vanilla transformers do not fully exploit the structure of the robot learning problem. Therefore, we propose Body Transformer (BoT), an architecture that leverages the robot embodiment by providing an inductive bias that guides the learning process. We represent the robot body as a graph of sensors and actuators, and rely on masked attention to pool information throughout the architecture. The resulting architecture outperforms the vanilla transformer, as well as the classical multilayer perceptron, in terms of task completion, scaling properties, and computational efficiency when representing either imitation or reinforcement learning policies. Additional material including the open-source code is available at https://sferrazza.cc/bot_site.
Characterizing Similarities and Divergences in Conversational Tones in Humans and LLMs by Sampling with People
Jun 06, 2024Conversational tones -- the manners and attitudes in which speakers communicate -- are essential to effective communication. Amidst the increasing popularization of Large Language Models (LLMs) over recent years, it becomes necessary to characterize the divergences in their conversational tones relative to humans. However, existing investigations of conversational modalities rely on pre-existing taxonomies or text corpora, which suffer from experimenter bias and may not be representative of real-world distributions for the studies' psycholinguistic domains. Inspired by methods from cognitive science, we propose an iterative method for simultaneously eliciting conversational tones and sentences, where participants alternate between two tasks: (1) one participant identifies the tone of a given sentence and (2) a different participant generates a sentence based on that tone. We run 100 iterations of this process with human participants and GPT-4, then obtain a dataset of sentences and frequent conversational tones. In an additional experiment, humans and GPT-4 annotated all sentences with all tones. With data from 1,339 human participants, 33,370 human judgments, and 29,900 GPT-4 queries, we show how our approach can be used to create an interpretable geometric representation of relations between conversational tones in humans and GPT-4. This work demonstrates how combining ideas from machine learning and cognitive science can address challenges in human-computer interactions.
HumanoidBench: Simulated Humanoid Benchmark for Whole-Body Locomotion and Manipulation
Mar 15, 2024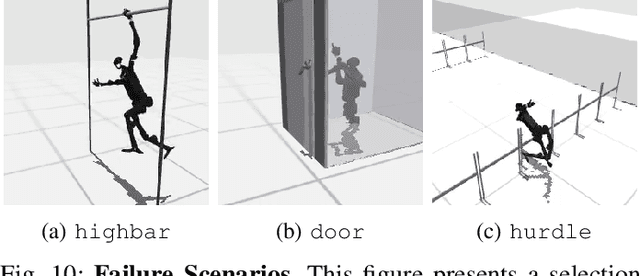
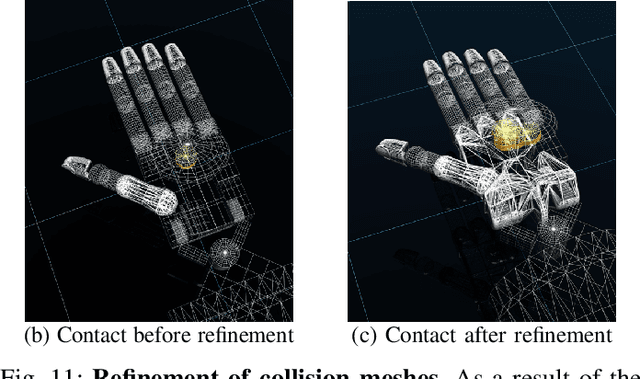
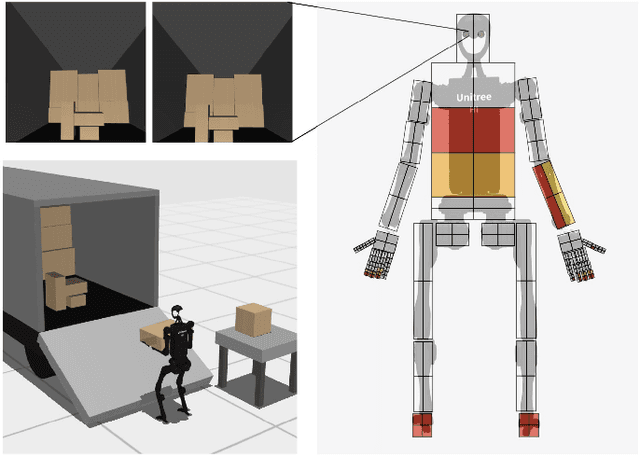
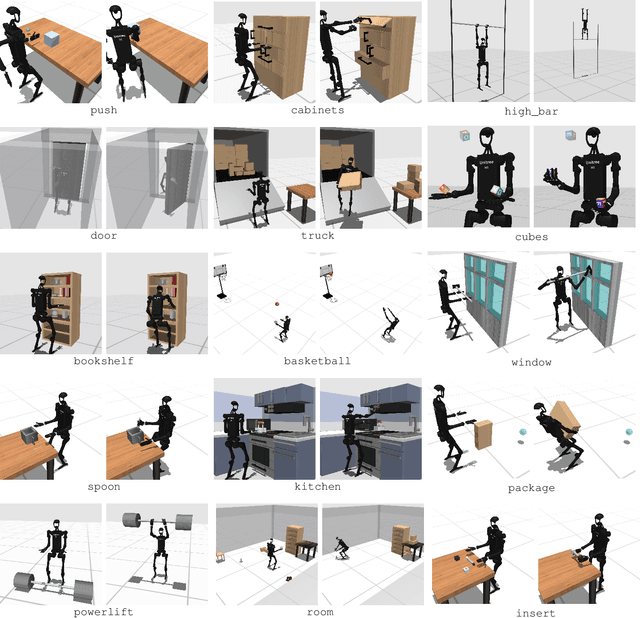
Humanoid robots hold great promise in assisting humans in diverse environments and tasks, due to their flexibility and adaptability leveraging human-like morphology. However, research in humanoid robots is often bottlenecked by the costly and fragile hardware setups. To accelerate algorithmic research in humanoid robots, we present a high-dimensional, simulated robot learning benchmark, HumanoidBench, featuring a humanoid robot equipped with dexterous hands and a variety of challenging whole-body manipulation and locomotion tasks. Our findings reveal that state-of-the-art reinforcement learning algorithms struggle with most tasks, whereas a hierarchical learning baseline achieves superior performance when supported by robust low-level policies, such as walking or reaching. With HumanoidBench, we provide the robotics community with a platform to identify the challenges arising when solving diverse tasks with humanoid robots, facilitating prompt verification of algorithms and ideas. The open-source code is available at https://sferrazza.cc/humanoidbench_site.