 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMutation-based Consistency Testing for Evaluating the Code Understanding Capability of LLMs
Jan 11, 2024



Large Language Models (LLMs) have shown remarkable capabilities in processing both natural and programming languages, which have enabled various applications in software engineering, such as requirement engineering, code generation, and software testing. However, existing code generation benchmarks do not necessarily assess the code understanding performance of LLMs, especially for the subtle inconsistencies that may arise between code and its semantics described in natural language. In this paper, we propose a novel method to systematically assess the code understanding performance of LLMs, particularly focusing on subtle differences between code and its descriptions, by introducing code mutations to existing code generation datasets. Code mutations are small changes that alter the semantics of the original code, creating a mismatch with the natural language description. We apply different types of code mutations, such as operator replacement and statement deletion, to generate inconsistent code-description pairs. We then use these pairs to test the ability of LLMs to correctly detect the inconsistencies. We propose a new LLM testing method, called Mutation-based Consistency Testing (MCT), and conduct a case study on the two popular LLMs, GPT-3.5 and GPT-4, using the state-of-the-art code generation benchmark, HumanEval-X, which consists of six programming languages (Python, C++, Java, Go, JavaScript, and Rust). We compare the performance of the LLMs across different types of code mutations and programming languages and analyze the results. We find that the LLMs show significant variation in their code understanding performance and that they have different strengths and weaknesses depending on the mutation type and language.
Identifying the Hazard Boundary of ML-enabled Autonomous Systems Using Cooperative Co-Evolutionary Search
Jan 31, 2023



In Machine Learning (ML)-enabled autonomous systems (MLASs), it is essential to identify the hazard boundary of ML Components (MLCs) in the MLAS under analysis. Given that such boundary captures the conditions in terms of MLC behavior and system context that can lead to hazards, it can then be used to, for example, build a safety monitor that can take any predefined fallback mechanisms at runtime when reaching the hazard boundary. However, determining such hazard boundary for an ML component is challenging. This is due to the space combining system contexts (i.e., scenarios) and MLC behaviors (i.e., inputs and outputs) being far too large for exhaustive exploration and even to handle using conventional metaheuristics, such as genetic algorithms. Additionally, the high computational cost of simulations required to determine any MLAS safety violations makes the problem even more challenging. Furthermore, it is unrealistic to consider a region in the problem space deterministically safe or unsafe due to the uncontrollable parameters in simulations and the non-linear behaviors of ML models (e.g., deep neural networks) in the MLAS under analysis. To address the challenges, we propose MLCSHE (ML Component Safety Hazard Envelope), a novel method based on a Cooperative Co-Evolutionary Algorithm (CCEA), which aims to tackle a high-dimensional problem by decomposing it into two lower-dimensional search subproblems. Moreover, we take a probabilistic view of safe and unsafe regions and define a novel fitness function to measure the distance from the probabilistic hazard boundary and thus drive the search effectively. We evaluate the effectiveness and efficiency of MLCSHE on a complex Autonomous Vehicle (AV) case study. Our evaluation results show that MLCSHE is significantly more effective and efficient compared to a standard genetic algorithm and random search.
Many-Objective Reinforcement Learning for Online Testing of DNN-Enabled Systems
Oct 27, 2022



Deep Neural Networks (DNNs) have been widely used to perform real-world tasks in cyber-physical systems such as Autonomous Diving Systems (ADS). Ensuring the correct behavior of such DNN-Enabled Systems (DES) is a crucial topic. Online testing is one of the promising modes for testing such systems with their application environments (simulated or real) in a closed loop taking into account the continuous interaction between the systems and their environments. However, the environmental variables (e.g., lighting conditions) that might change during the systems' operation in the real world, causing the DES to violate requirements (safety, functional), are often kept constant during the execution of an online test scenario due to the two major challenges: (1) the space of all possible scenarios to explore would become even larger if they changed and (2) there are typically many requirements to test simultaneously. In this paper, we present MORLOT (Many-Objective Reinforcement Learning for Online Testing), a novel online testing approach to address these challenges by combining Reinforcement Learning (RL) and many-objective search. MORLOT leverages RL to incrementally generate sequences of environmental changes while relying on many-objective search to determine the changes so that they are more likely to achieve any of the uncovered objectives. We empirically evaluate MORLOT using CARLA, a high-fidelity simulator widely used for autonomous driving research, integrated with Transfuser, a DNN-enabled ADS for end-to-end driving. The evaluation results show that MORLOT is significantly more effective and efficient than alternatives with a large effect size. In other words, MORLOT is a good option to test DES with dynamically changing environments while accounting for multiple safety requirements.
Can Offline Testing of Deep Neural Networks Replace Their Online Testing?
Jan 26, 2021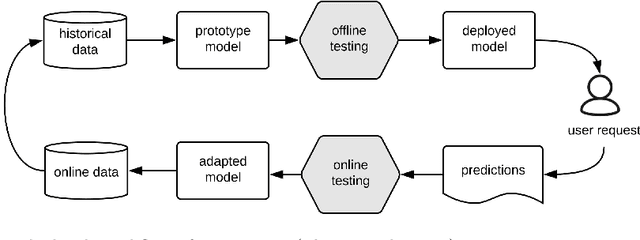
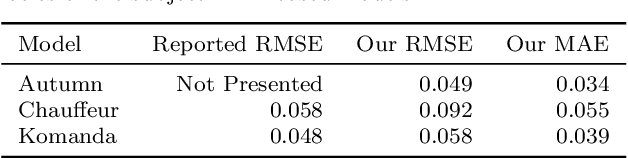
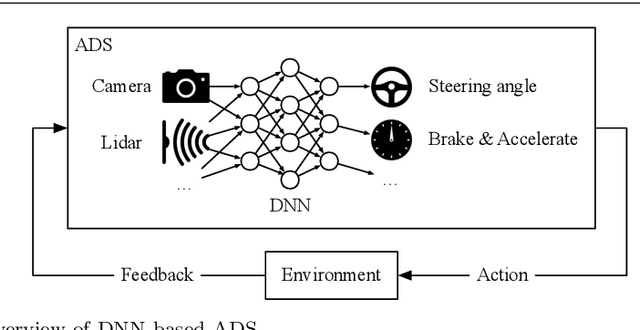
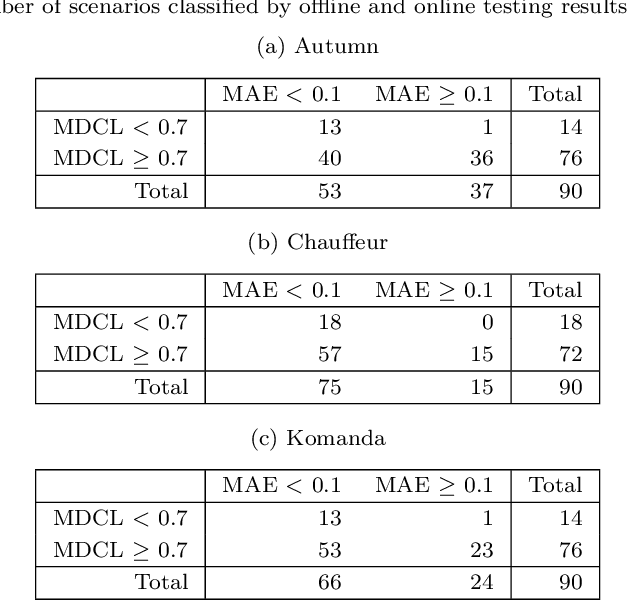
We distinguish two general modes of testing for Deep Neural Networks (DNNs): Offline testing where DNNs are tested as individual units based on test datasets obtained independently from the DNNs under test, and online testing where DNNs are embedded into a specific application environment and tested in a closed-loop mode in interaction with the application environment. Typically, DNNs are subjected to both types of testing during their development life cycle where offline testing is applied immediately after DNN training and online testing follows after offline testing and once a DNN is deployed within a specific application environment. In this paper, we study the relationship between offline and online testing. Our goal is to determine how offline testing and online testing differ or complement one another and if we can use offline testing results to run fewer tests during online testing to reduce the testing cost. Though these questions are generally relevant to all autonomous systems, we study them in the context of automated driving systems where, as study subjects, we use DNNs automating end-to-end controls of steering functions of self-driving vehicles. Our results show that offline testing is more optimistic than online testing as many safety violations identified by online testing could not be identified by offline testing, while large prediction errors generated by offline testing always led to severe safety violations detectable by online testing. Further, we cannot use offline testing results to run fewer tests during online testing in practice since we are not able to identify specific situations where offline testing could be as accurate as online testing in identifying safety requirement violations.
Digital Twins Are Not Monozygotic -- Cross-Replicating ADAS Testing in Two Industry-Grade Automotive Simulators
Dec 12, 2020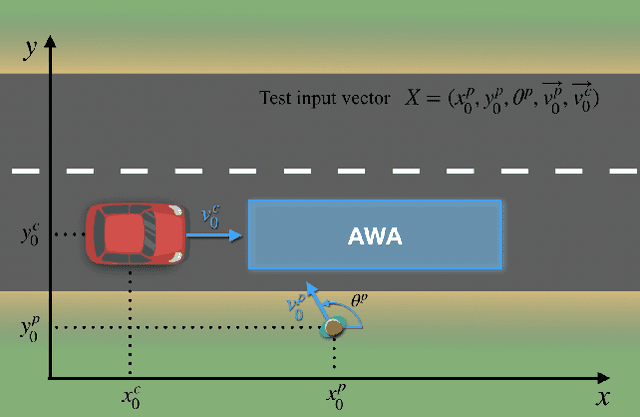
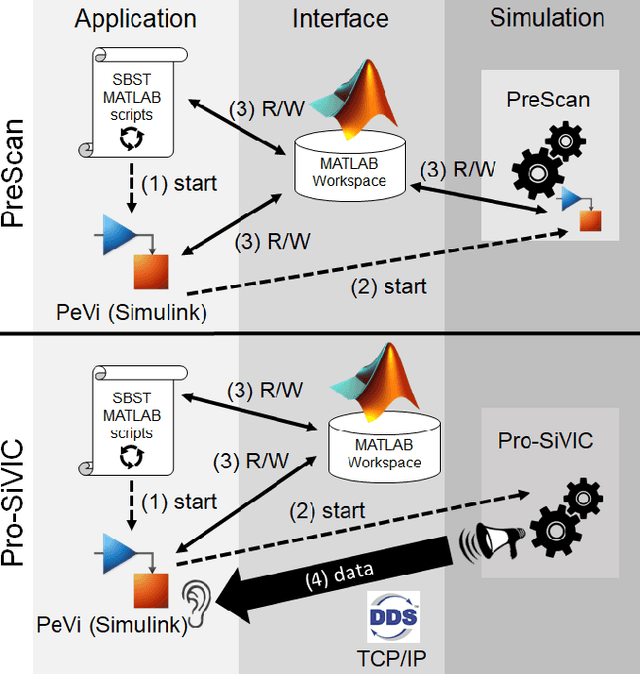
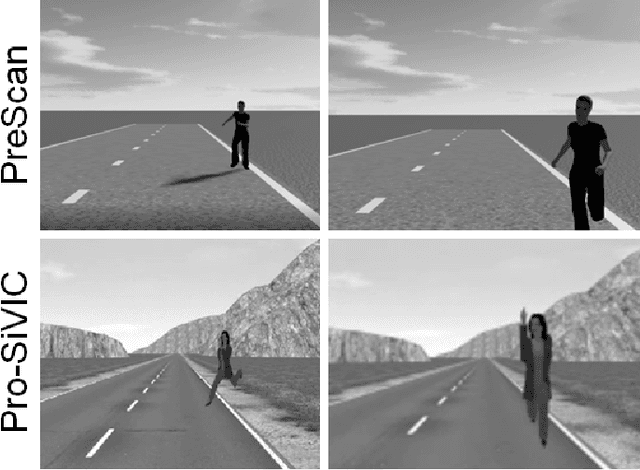
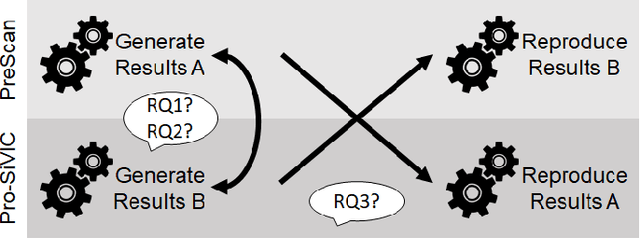
The increasing levels of software- and data-intensive driving automation call for an evolution of automotive software testing. As a recommended practice of the Verification and Validation (V&V) process of ISO/PAS 21448, a candidate standard for safety of the intended functionality for road vehicles, simulation-based testing has the potential to reduce both risks and costs. There is a growing body of research on devising test automation techniques using simulators for Advanced Driver-Assistance Systems (ADAS). However, how similar are the results if the same test scenarios are executed in different simulators? We conduct a replication study of applying a Search-Based Software Testing (SBST) solution to a real-world ADAS (PeVi, a pedestrian vision detection system) using two different commercial simulators, namely, TASS/Siemens PreScan and ESI Pro-SiVIC. Based on a minimalistic scene, we compare critical test scenarios generated using our SBST solution in these two simulators. We show that SBST can be used to effectively and efficiently generate critical test scenarios in both simulators, and the test results obtained from the two simulators can reveal several weaknesses of the ADAS under test. However, executing the same test scenarios in the two simulators leads to notable differences in the details of the test outputs, in particular, related to (1) safety violations revealed by tests, and (2) dynamics of cars and pedestrians. Based on our findings, we recommend future V&V plans to include multiple simulators to support robust simulation-based testing and to base test objectives on measures that are less dependant on the internals of the simulators.
Automatic Test Suite Generation for Key-points Detection DNNs Using Many-Objective Search
Dec 11, 2020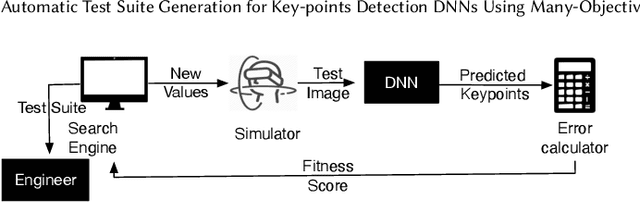
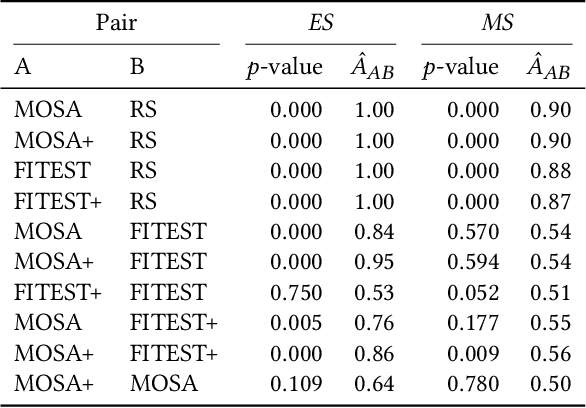
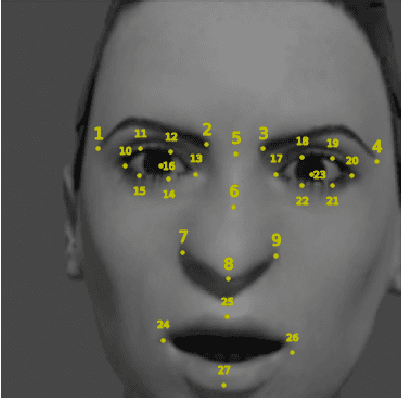
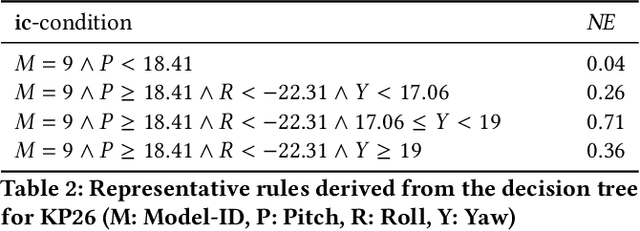
Automatically detecting the positions of key-points (e.g., facial key-points or finger key-points) in an image is an essential problem in many applications, such as driver's gaze detection and drowsiness detection in automated driving systems. With the recent advances of Deep Neural Networks (DNNs), Key-Points detection DNNs (KP-DNNs) have been increasingly employed for that purpose. Nevertheless, KP-DNN testing and validation have remained a challenging problem because KP-DNNs predict many independent key-points at the same time -- where each individual key-point may be critical in the targeted application -- and images can vary a great deal according to many factors. In this paper, we present an approach to automatically generate test data for KP-DNNs using many-objective search. In our experiments, focused on facial key-points detection DNNs developed for an industrial automotive application, we show that our approach can generate test suites to severely mispredict, on average, more than 93% of all key-points. In comparison, random search-based test data generation can only severely mispredict 41% of them. Many of these mispredictions, however, are not avoidable and should not therefore be considered failures. We also empirically compare state-of-the-art, many-objective search algorithms and their variants, tailored for test suite generation. Furthermore, we investigate and demonstrate how to learn specific conditions, based on image characteristics (e.g., head posture and skin color), that lead to severe mispredictions. Such conditions serve as a basis for risk analysis or DNN retraining.
Comparing Offline and Online Testing of Deep Neural Networks: An Autonomous Car Case Study
Nov 28, 2019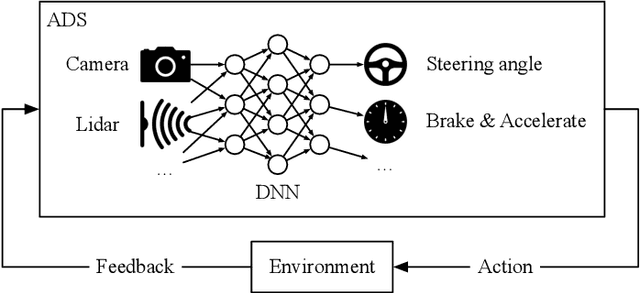
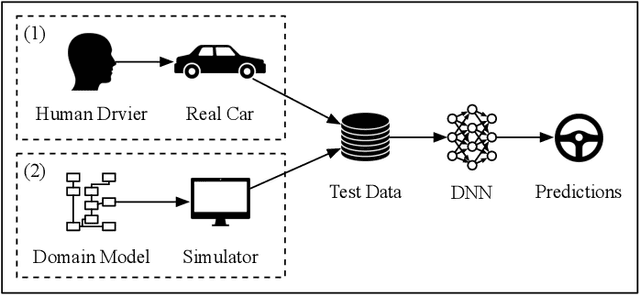
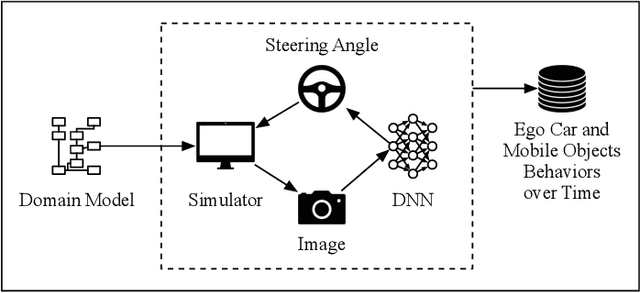
There is a growing body of research on developing testing techniques for Deep Neural Networks (DNN). We distinguish two general modes of testing for DNNs: Offline testing where DNNs are tested as individual units based on test datasets obtained independently from the DNNs under test, and online testing where DNNs are embedded into a specific application and tested in a close-loop mode in interaction with the application environment. In addition, we identify two sources for generating test datasets for DNNs: Datasets obtained from real-life and datasets generated by simulators. While offline testing can be used with datasets obtained from either sources, online testing is largely confined to using simulators since online testing within real-life applications can be time-consuming, expensive and dangerous. In this paper, we study the following two important questions aiming to compare test datasets and testing modes for DNNs: First, can we use simulator-generated data as a reliable substitute to real-world data for the purpose of DNN testing? Second, how do online and offline testing results differ and complement each other? Though these questions are generally relevant to all autonomous systems, we study them in the context of automated driving systems where, as study subjects, we use DNNs automating end-to-end control of cars' steering actuators. Our results show that simulator-generated datasets are able to yield DNN prediction errors that are similar to those obtained by testing DNNs with real-life datasets. Further, offline testing is more optimistic than online testing as many safety violations identified by online testing could not be identified by offline testing, while large prediction errors generated by offline testing always led to severe safety violations detectable by online testing.