 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan Offline Testing of Deep Neural Networks Replace Their Online Testing?
Paper and Code
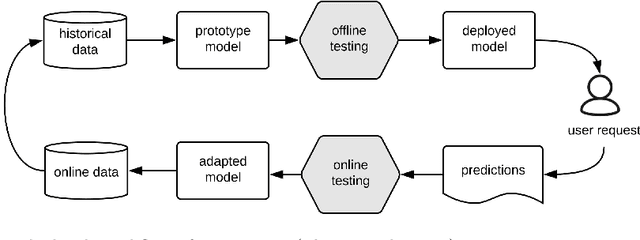
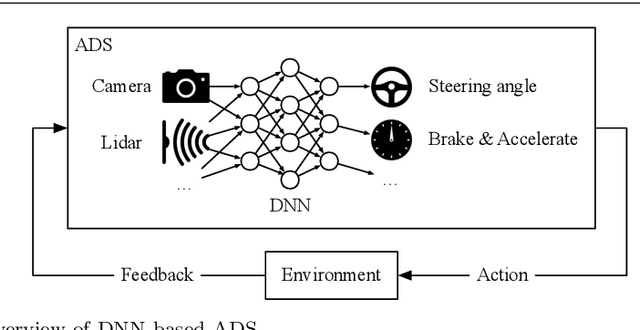
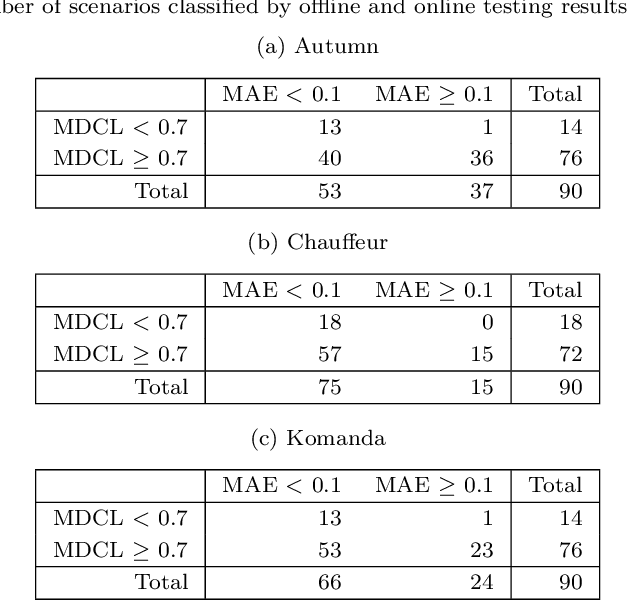
We distinguish two general modes of testing for Deep Neural Networks (DNNs): Offline testing where DNNs are tested as individual units based on test datasets obtained independently from the DNNs under test, and online testing where DNNs are embedded into a specific application environment and tested in a closed-loop mode in interaction with the application environment. Typically, DNNs are subjected to both types of testing during their development life cycle where offline testing is applied immediately after DNN training and online testing follows after offline testing and once a DNN is deployed within a specific application environment. In this paper, we study the relationship between offline and online testing. Our goal is to determine how offline testing and online testing differ or complement one another and if we can use offline testing results to run fewer tests during online testing to reduce the testing cost. Though these questions are generally relevant to all autonomous systems, we study them in the context of automated driving systems where, as study subjects, we use DNNs automating end-to-end controls of steering functions of self-driving vehicles. Our results show that offline testing is more optimistic than online testing as many safety violations identified by online testing could not be identified by offline testing, while large prediction errors generated by offline testing always led to severe safety violations detectable by online testing. Further, we cannot use offline testing results to run fewer tests during online testing in practice since we are not able to identify specific situations where offline testing could be as accurate as online testing in identifying safety requirement violations.