 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoordAR: One-Reference 6D Pose Estimation of Novel Objects via Autoregressive Coordinate Map Generation
Nov 17, 2025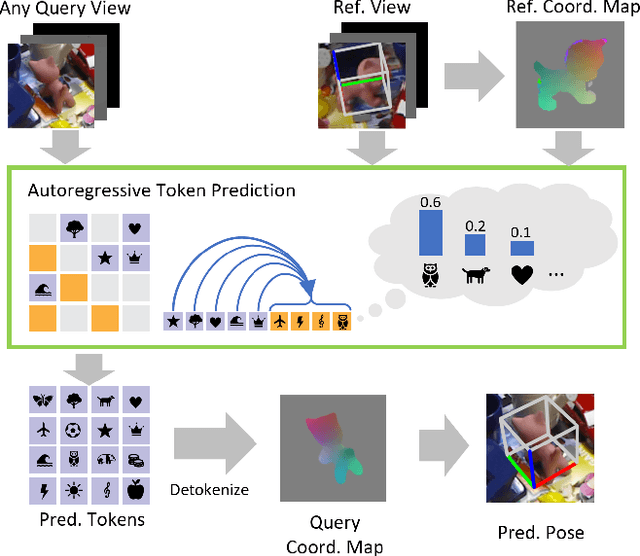
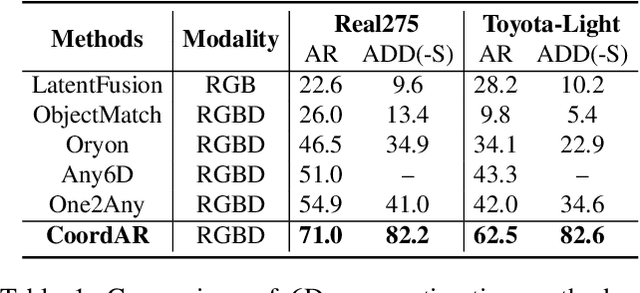
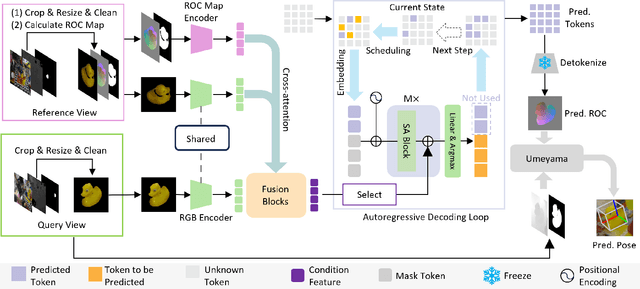
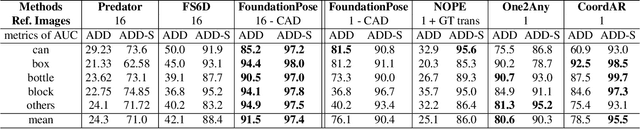
Object 6D pose estimation, a crucial task for robotics and augmented reality applications, becomes particularly challenging when dealing with novel objects whose 3D models are not readily available. To reduce dependency on 3D models, recent studies have explored one-reference-based pose estimation, which requires only a single reference view instead of a complete 3D model. However, existing methods that rely on real-valued coordinate regression suffer from limited global consistency due to the local nature of convolutional architectures and face challenges in symmetric or occluded scenarios owing to a lack of uncertainty modeling. We present CoordAR, a novel autoregressive framework for one-reference 6D pose estimation of unseen objects. CoordAR formulates 3D-3D correspondences between the reference and query views as a map of discrete tokens, which is obtained in an autoregressive and probabilistic manner. To enable accurate correspondence regression, CoordAR introduces 1) a novel coordinate map tokenization that enables probabilistic prediction over discretized 3D space; 2) a modality-decoupled encoding strategy that separately encodes RGB appearance and coordinate cues; and 3) an autoregressive transformer decoder conditioned on both position-aligned query features and the partially generated token sequence. With these novel mechanisms, CoordAR significantly outperforms existing methods on multiple benchmarks and demonstrates strong robustness to symmetry, occlusion, and other challenges in real-world tests.
StableTracker: Learning to Stably Track Target via Differentiable Simulation
Sep 17, 2025FPV object tracking methods heavily rely on handcraft modular designs, resulting in hardware overload and cumulative error, which seriously degrades the tracking performance, especially for rapidly accelerating or decelerating targets. To address these challenges, we present \textbf{StableTracker}, a learning-based control policy that enables quadrotors to robustly follow the moving target from arbitrary perspectives. The policy is trained using backpropagation-through-time via differentiable simulation, allowing the quadrotor to maintain the target at the center of the visual field in both horizontal and vertical directions, while keeping a fixed relative distance, thereby functioning as an autonomous aerial camera. We compare StableTracker against both state-of-the-art traditional algorithms and learning baselines. Simulation experiments demonstrate that our policy achieves superior accuracy, stability and generalization across varying safe distances, trajectories, and target velocities. Furthermore, a real-world experiment on a quadrotor with an onboard computer validated practicality of the proposed approach.
Efficient Virtual View Selection for 3D Hand Pose Estimation
Mar 29, 2022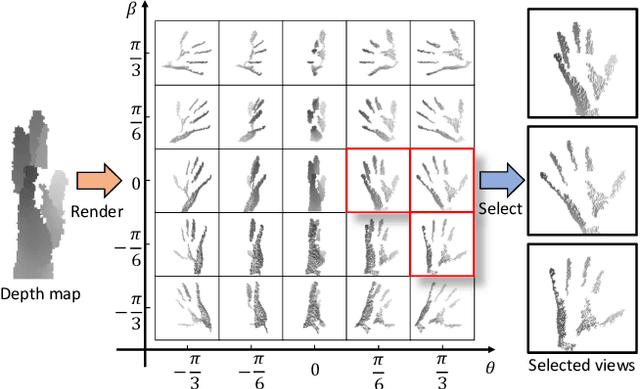
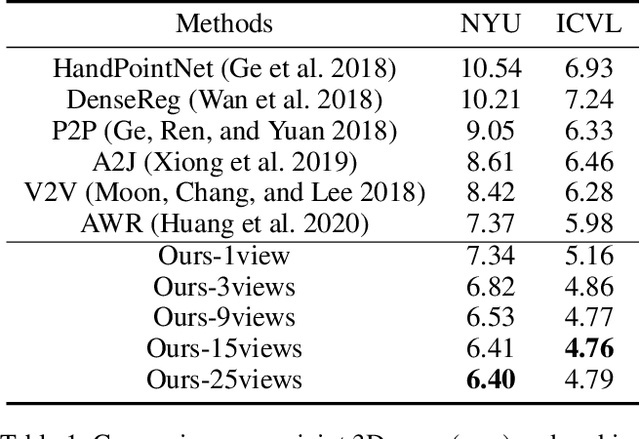
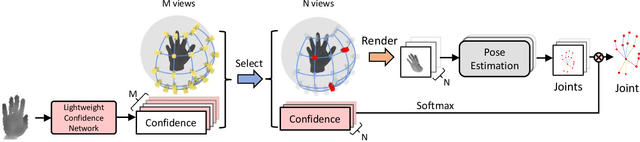
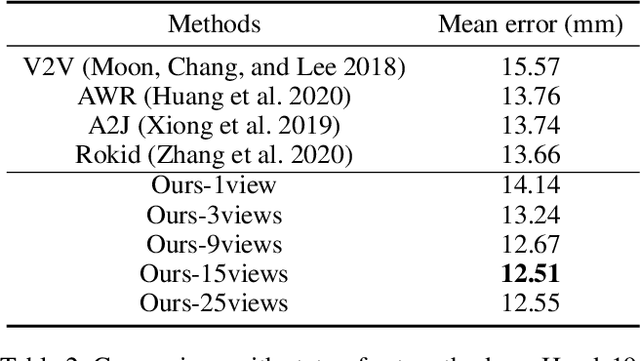
3D hand pose estimation from single depth is a fundamental problem in computer vision, and has wide applications.However, the existing methods still can not achieve satisfactory hand pose estimation results due to view variation and occlusion of human hand. In this paper, we propose a new virtual view selection and fusion module for 3D hand pose estimation from single depth.We propose to automatically select multiple virtual viewpoints for pose estimation and fuse the results of all and find this empirically delivers accurate and robust pose estimation. In order to select most effective virtual views for pose fusion, we evaluate the virtual views based on the confidence of virtual views using a light-weight network via network distillation. Experiments on three main benchmark datasets including NYU, ICVL and Hands2019 demonstrate that our method outperforms the state-of-the-arts on NYU and ICVL, and achieves very competitive performance on Hands2019-Task1, and our proposed virtual view selection and fusion module is both effective for 3D hand pose estimation.