 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeta-Learning for Fast Adaptation in Intent Inferral on a Robotic Hand Orthosis for Stroke
Mar 19, 2024



We propose MetaEMG, a meta-learning approach for fast adaptation in intent inferral on a robotic hand orthosis for stroke. One key challenge in machine learning for assistive and rehabilitative robotics with disabled-bodied subjects is the difficulty of collecting labeled training data. Muscle tone and spasticity often vary significantly among stroke subjects, and hand function can even change across different use sessions of the device for the same subject. We investigate the use of meta-learning to mitigate the burden of data collection needed to adapt high-capacity neural networks to a new session or subject. Our experiments on real clinical data collected from five stroke subjects show that MetaEMG can improve the intent inferral accuracy with a small session- or subject-specific dataset and very few fine-tuning epochs. To the best of our knowledge, we are the first to formulate intent inferral on stroke subjects as a meta-learning problem and demonstrate fast adaptation to a new session or subject for controlling a robotic hand orthosis with EMG signals.
PrimSeq: a deep learning-based pipeline to quantitate rehabilitation training
Dec 22, 2021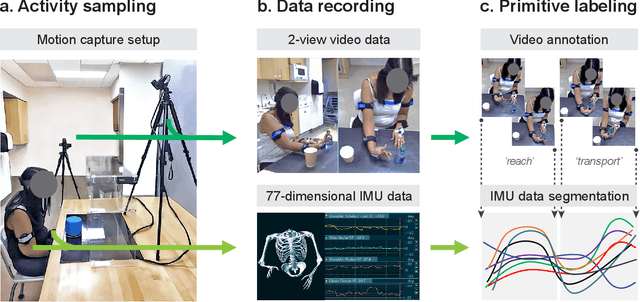
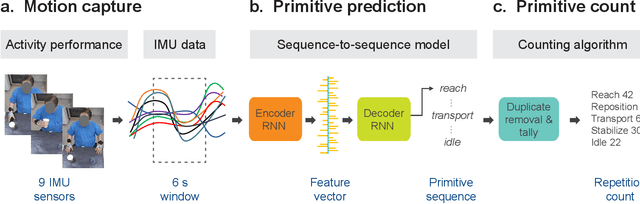
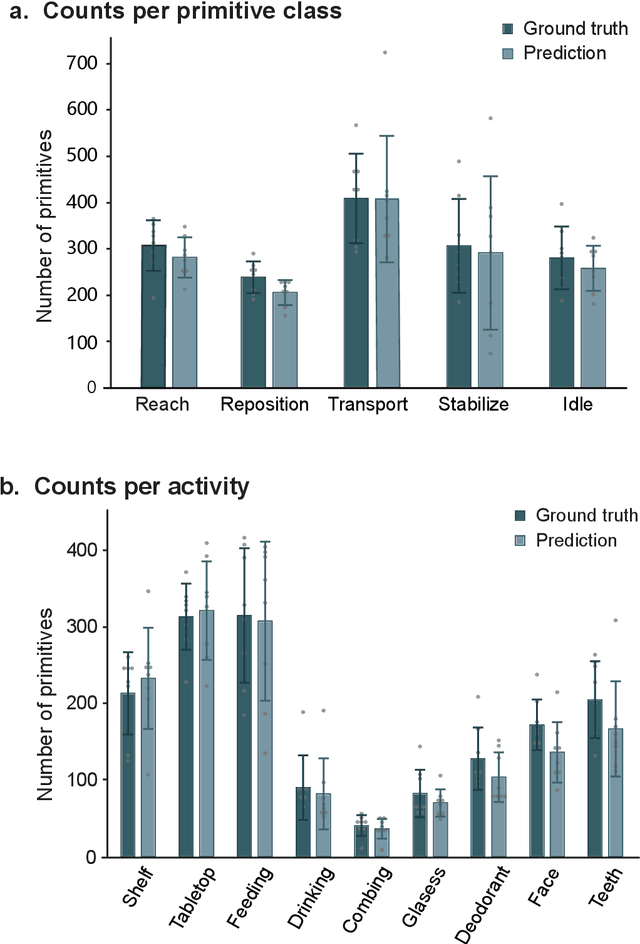
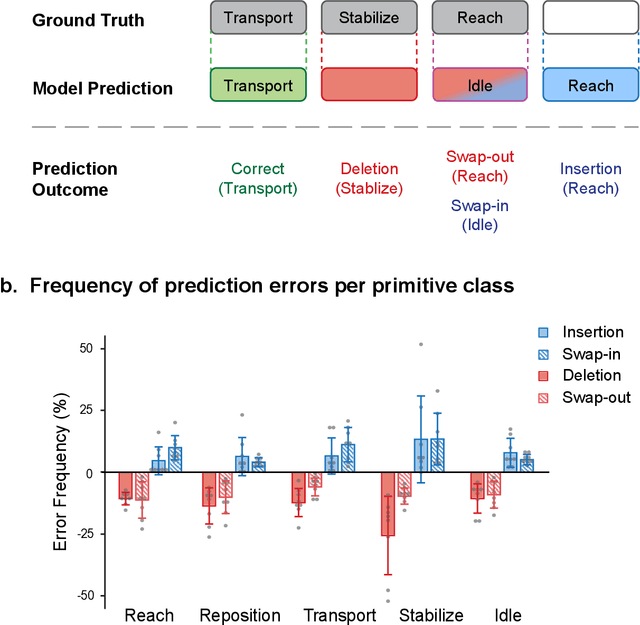
Stroke rehabilitation seeks to increase neuroplasticity through the repeated practice of functional motions, but may have minimal impact on recovery because of insufficient repetitions. The optimal training content and quantity are currently unknown because no practical tools exist to measure them. Here, we present PrimSeq, a pipeline to classify and count functional motions trained in stroke rehabilitation. Our approach integrates wearable sensors to capture upper-body motion, a deep learning model to predict motion sequences, and an algorithm to tally motions. The trained model accurately decomposes rehabilitation activities into component functional motions, outperforming competitive machine learning methods. PrimSeq furthermore quantifies these motions at a fraction of the time and labor costs of human experts. We demonstrate the capabilities of PrimSeq in previously unseen stroke patients with a range of upper extremity motor impairment. We expect that these advances will support the rigorous measurement required for quantitative dosing trials in stroke rehabilitation.
Design of Spiral-Cable Forearm Exoskeleton to Provide Supination Adjustment for Hemiparetic Stroke Subjects
Oct 05, 2021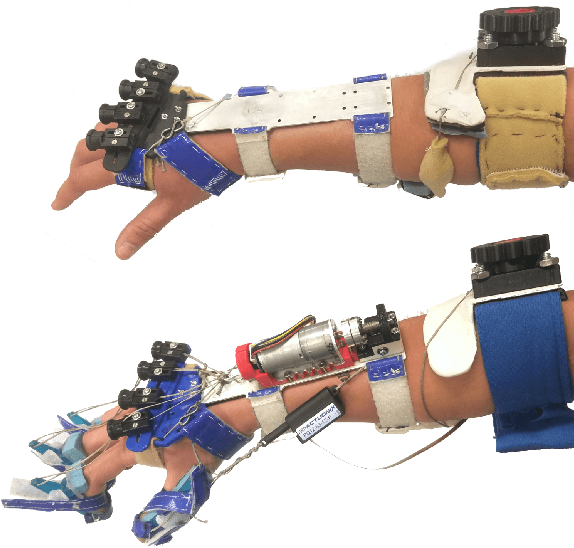
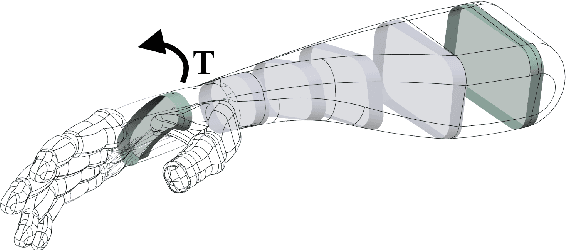
We present the development of a cable-based passive forearm exoskeleton, designed to assist supination for hemiparetic stroke survivors, that uniquely provides torque sufficient for counteracting spasticity within a below-elbow apparatus. The underactuated mechanism consists of a spiral single-tendon routing embedded in a rigid forearm brace and terminated at the hand and upper-forearm. A spool with an internal releasable-ratchet mechanism allows the user to manually retract the tendon and rotate the hand to counteract involuntary pronation synergies due to stroke. We performed device characterization with two healthy subjects, and conducted a feasibility test of the forearm mechanism in maintaining a neutral hand position with a single chronic stroke subject having no volitional supination capacity. Our preliminary assessment on an impaired subject suggests comparative performance in supination assistance between our implementation and a commercial passive splint, and shows promise in improving capabilities of existing robotic exoskeletons for stroke.
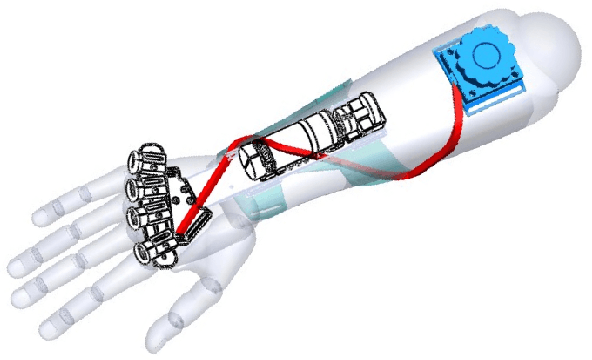
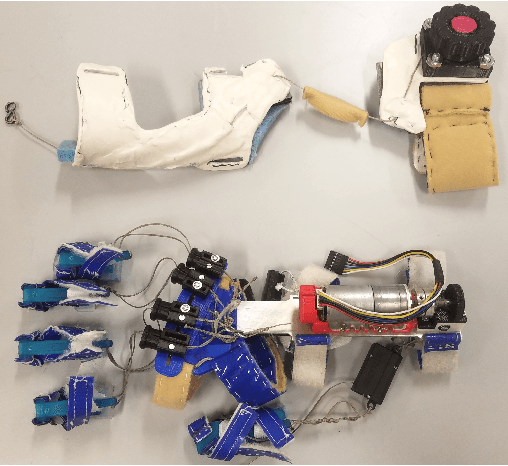
Thumb Assistance Via Active and Passive Exotendons in a Robotic Hand Orthosis for Stroke
Oct 05, 2021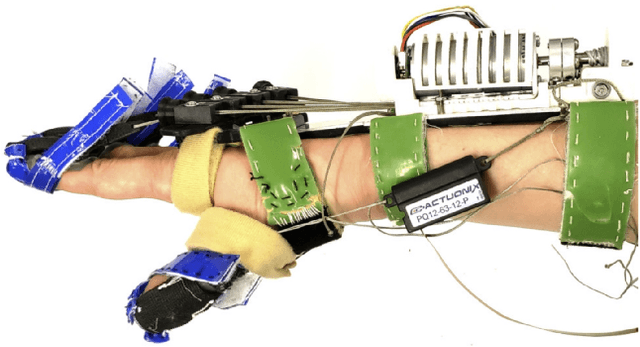
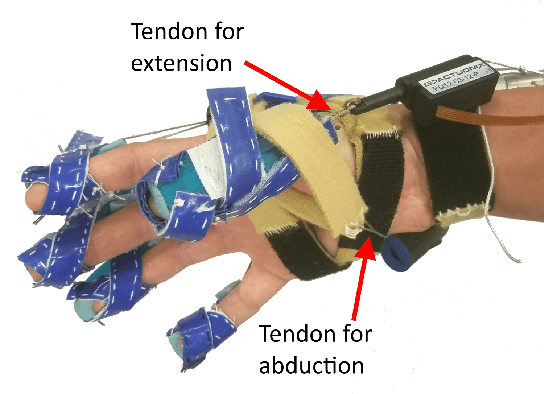

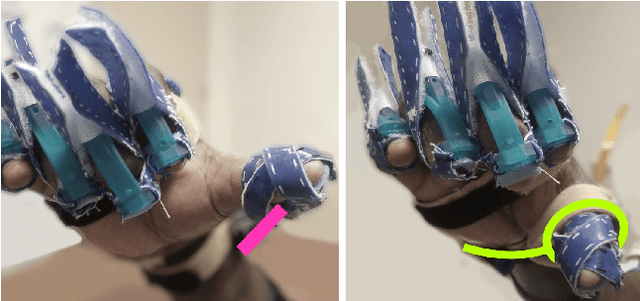
We present a tendon-driven, active-extension thumb exoskeleton adding opposition/reposition capabilities to a robotic hand orthosis designed for individuals with chronic upper-limb hemiparesis after stroke. The orthosis uses two actuators to assist hand-opening, with one tendon network controlling simultaneous four-finger extension and one separately driving thumb extension. When combined with a passive palmar abduction constraint, the thumb network can counteract spasticity and provide stable thumb opposition for manipulating objects in a range of sizes. We performed a preliminary assessment with five chronic stroke survivors presenting with arm-hand motor deficits and increased muscle tone (spasticity). Experiments consisted of unimanual resistive-pull tasks and bimanual twisting tasks with simulated real-world objects; these explored the effects of thumb assistance on grasp stability and functional range of motion. We specifically compare functional performance of actuation against static thumb-splinting and against no device. The addition of active-extension to the thumb improves positioning ability when reaching for objects, and improves consistency and duration of maintaining stable grasps.