 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of Spiral-Cable Forearm Exoskeleton to Provide Supination Adjustment for Hemiparetic Stroke Subjects
Paper and Code
Oct 05, 2021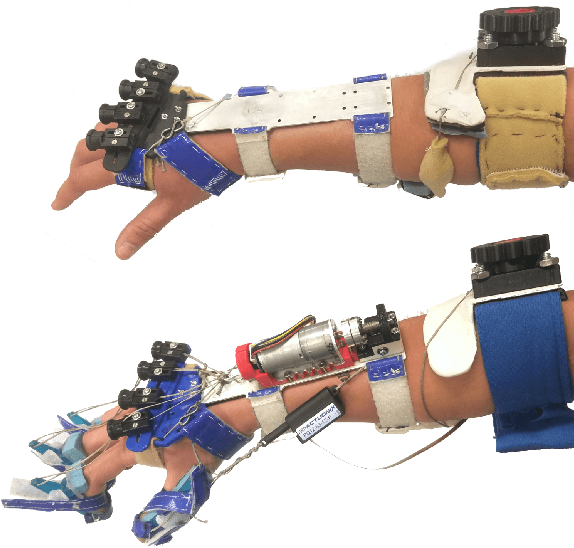
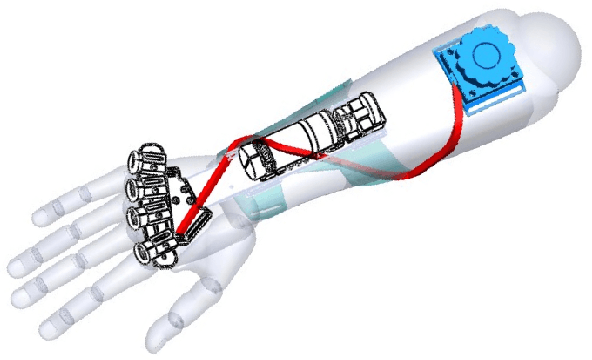
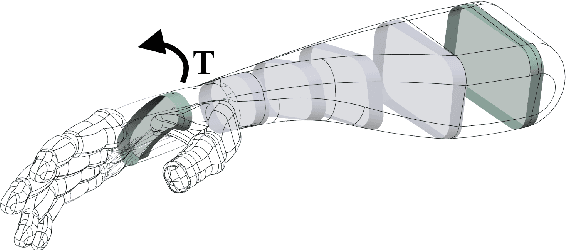
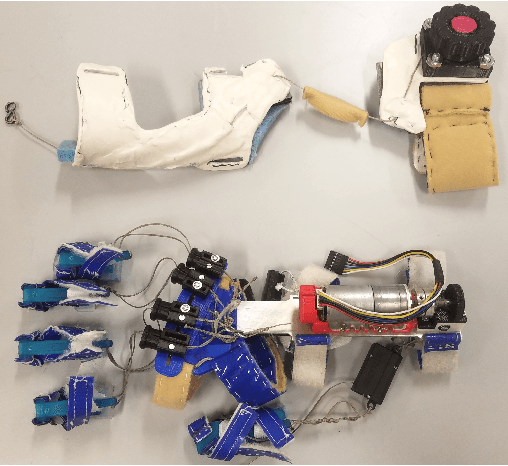
We present the development of a cable-based passive forearm exoskeleton, designed to assist supination for hemiparetic stroke survivors, that uniquely provides torque sufficient for counteracting spasticity within a below-elbow apparatus. The underactuated mechanism consists of a spiral single-tendon routing embedded in a rigid forearm brace and terminated at the hand and upper-forearm. A spool with an internal releasable-ratchet mechanism allows the user to manually retract the tendon and rotate the hand to counteract involuntary pronation synergies due to stroke. We performed device characterization with two healthy subjects, and conducted a feasibility test of the forearm mechanism in maintaining a neutral hand position with a single chronic stroke subject having no volitional supination capacity. Our preliminary assessment on an impaired subject suggests comparative performance in supination assistance between our implementation and a commercial passive splint, and shows promise in improving capabilities of existing robotic exoskeletons for stroke.