 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThumb Assistance Via Active and Passive Exotendons in a Robotic Hand Orthosis for Stroke
Paper and Code
Oct 05, 2021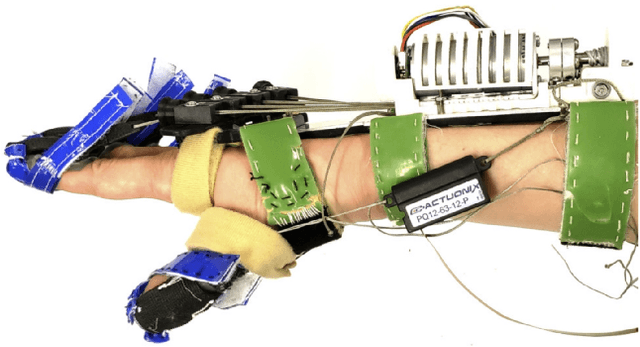
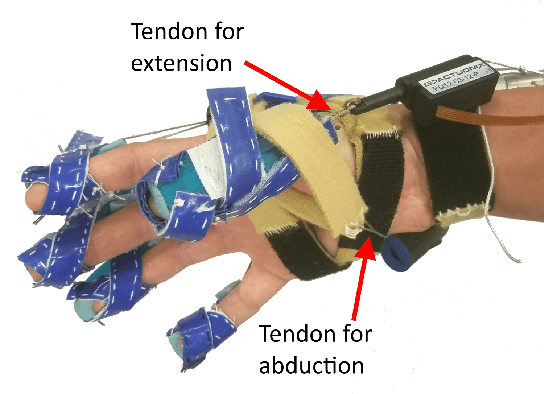

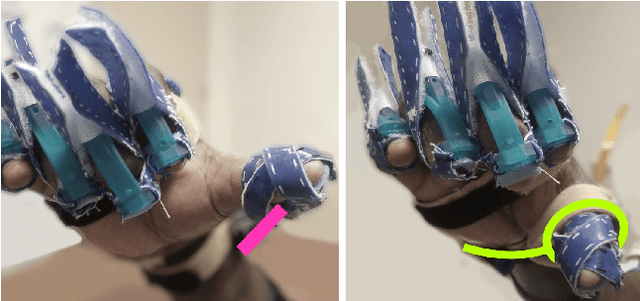
We present a tendon-driven, active-extension thumb exoskeleton adding opposition/reposition capabilities to a robotic hand orthosis designed for individuals with chronic upper-limb hemiparesis after stroke. The orthosis uses two actuators to assist hand-opening, with one tendon network controlling simultaneous four-finger extension and one separately driving thumb extension. When combined with a passive palmar abduction constraint, the thumb network can counteract spasticity and provide stable thumb opposition for manipulating objects in a range of sizes. We performed a preliminary assessment with five chronic stroke survivors presenting with arm-hand motor deficits and increased muscle tone (spasticity). Experiments consisted of unimanual resistive-pull tasks and bimanual twisting tasks with simulated real-world objects; these explored the effects of thumb assistance on grasp stability and functional range of motion. We specifically compare functional performance of actuation against static thumb-splinting and against no device. The addition of active-extension to the thumb improves positioning ability when reaching for objects, and improves consistency and duration of maintaining stable grasps.