 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelative Illumination Fields: Learning Medium and Light Independent Underwater Scenes
Apr 14, 2025We address the challenge of constructing a consistent and photorealistic Neural Radiance Field in inhomogeneously illuminated, scattering environments with unknown, co-moving light sources. While most existing works on underwater scene representation focus on a static homogeneous illumination, limited attention has been paid to scenarios such as when a robot explores water deeper than a few tens of meters, where sunlight becomes insufficient. To address this, we propose a novel illumination field locally attached to the camera, enabling the capture of uneven lighting effects within the viewing frustum. We combine this with a volumetric medium representation to an overall method that effectively handles interaction between dynamic illumination field and static scattering medium. Evaluation results demonstrate the effectiveness and flexibility of our approach.
Refractive COLMAP: Refractive Structure-from-Motion Revisited
Mar 13, 2024In this paper, we present a complete refractive Structure-from-Motion (RSfM) framework for underwater 3D reconstruction using refractive camera setups (for both, flat- and dome-port underwater housings). Despite notable achievements in refractive multi-view geometry over the past decade, a robust, complete and publicly available solution for such tasks is not available at present, and often practical applications have to resort to approximating refraction effects by the intrinsic (distortion) parameters of a pinhole camera model. To fill this gap, we have integrated refraction considerations throughout the entire SfM process within the state-of-the-art, open-source SfM framework COLMAP. Numerical simulations and reconstruction results on synthetically generated but photo-realistic images with ground truth validate that enabling refraction does not compromise accuracy or robustness as compared to in-air reconstructions. Finally, we demonstrate the capability of our approach for large-scale refractive scenarios using a dataset consisting of nearly 6000 images. The implementation is released as open-source at: https://cau-git.rz.uni-kiel.de/inf-ag-koeser/colmap_underwater.
Visual Tomography: Physically Faithful Volumetric Models of Partially Translucent Objects
Dec 21, 2023When created faithfully from real-world data, Digital 3D representations of objects can be useful for human or computer-assisted analysis. Such models can also serve for generating training data for machine learning approaches in settings where data is difficult to obtain or where too few training data exists, e.g. by providing novel views or images in varying conditions. While the vast amount of visual 3D reconstruction approaches focus on non-physical models, textured object surfaces or shapes, in this contribution we propose a volumetric reconstruction approach that obtains a physical model including the interior of partially translucent objects such as plankton or insects. Our technique photographs the object under different poses in front of a bright white light source and computes absorption and scattering per voxel. It can be interpreted as visual tomography that we solve by inverse raytracing. We additionally suggest a method to convert non-physical NeRF media into a physically-based volumetric grid for initialization and illustrate the usefulness of the approach using two real-world plankton validation sets, the lab-scanned models being finally also relighted and virtually submerged in a scenario with augmented medium and illumination conditions. Please visit the project homepage at www.marine.informatik.uni-kiel.de/go/vito
Efficient Large-scale AUV-based Visual Seafloor Mapping
Aug 11, 2023Driven by the increasing number of marine data science applications, there is a growing interest in surveying and exploring the vast, uncharted terrain of the deep sea with robotic platforms. Despite impressive results achieved by many on-land visual mapping algorithms in the past decades, transferring these methods from land to the deep sea remains a challenge due to harsh environmental conditions. Typically, deep-sea exploration involves the use of autonomous underwater vehicles (AUVs) equipped with high-resolution cameras and artificial illumination systems. However, images obtained in this manner often suffer from heterogeneous illumination and quality degradation due to attenuation and scattering, on top of refraction of light rays. All of this together often lets on-land SLAM approaches fail underwater or makes Structure-from-Motion approaches drift or omit difficult images, resulting in gaps, jumps or weakly registered areas. In this work, we present a system that incorporates recent developments in underwater imaging and visual mapping to facilitate automated robotic 3D reconstruction of hectares of seafloor. Our approach is efficient in that it detects and reconsiders difficult, weakly registered areas, to avoid omitting images and to make better use of limited dive time; on the other hand it is computationally efficient; leveraging a hybrid approach combining benefits from SLAM and Structure-from-Motion that runs much faster than incremental reconstructions while achieving at least on-par performance. The proposed system has been extensively tested and evaluated during several research cruises, demonstrating its robustness and practicality in real-world conditions.
Investigation of the Challenges of Underwater-Visual-Monocular-SLAM
Jun 14, 2023In this paper, we present a comprehensive investigation of the challenges of Monocular Visual Simultaneous Localization and Mapping (vSLAM) methods for underwater robots. While significant progress has been made in state estimation methods that utilize visual data in the past decade, most evaluations have been limited to controlled indoor and urban environments, where impressive performance was demonstrated. However, these techniques have not been extensively tested in extremely challenging conditions, such as underwater scenarios where factors such as water and light conditions, robot path, and depth can greatly impact algorithm performance. Hence, our evaluation is conducted in real-world AUV scenarios as well as laboratory settings which provide precise external reference. A focus is laid on understanding the impact of environmental conditions, such as optical properties of the water and illumination scenarios, on the performance of monocular vSLAM methods. To this end, we first show that all methods perform very well in in-air settings and subsequently show the degradation of their performance in challenging underwater environments. The final goal of this study is to identify techniques that can improve accuracy and robustness of SLAM methods in such conditions. To achieve this goal, we investigate the potential of image enhancement techniques to improve the quality of input images used by the SLAM methods, specifically in low visibility and extreme lighting scenarios in scattering media. We present a first evaluation on calibration maneuvers and simple image restoration techniques to determine their ability to enable or enhance the performance of monocular SLAM methods in underwater environments.
Design, Implementation and Evaluation of an External Pose-Tracking System for Underwater Cameras
May 07, 2023



In order to advance underwater computer vision and robotics from lab environments and clear water scenarios to the deep dark ocean or murky coastal waters, representative benchmarks and realistic datasets with ground truth information are required. In particular, determining the camera pose is essential for many underwater robotic or photogrammetric applications and known ground truth is mandatory to evaluate the performance of e.g., simultaneous localization and mapping approaches in such extreme environments. This paper presents the conception, calibration and implementation of an external reference system for determining the underwater camera pose in real-time. The approach, based on an HTC Vive tracking system in air, calculates the underwater camera pose by fusing the poses of two controllers tracked above the water surface of a tank. It is shown that the mean deviation of this approach to an optical marker based reference in air is less than 3 mm and 0.3{\deg}. Finally, the usability of the system for underwater applications is demonstrated.
Refractive Geometry for Underwater Domes
Aug 14, 2021
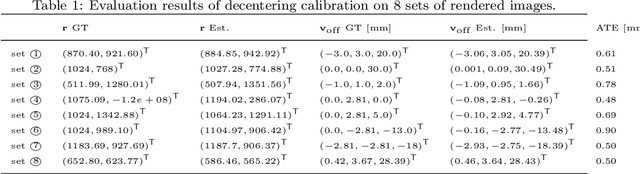
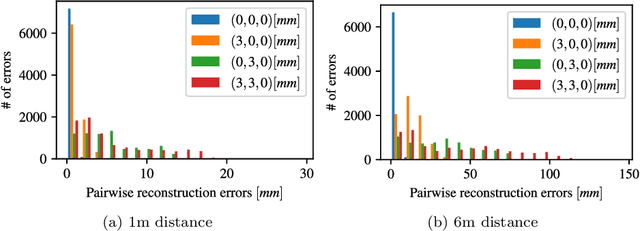

Underwater cameras are typically placed behind glass windows to protect them from the water. Spherical glass, a dome port, is well suited for high water pressures at great depth, allows for a large field of view, and avoids refraction if a pinhole camera is positioned exactly at the sphere's center. Adjusting a real lens perfectly to the dome center is a challenging task, both in terms of how to actually guide the centering process (e.g. visual servoing) and how to measure the alignment quality, but also, how to mechanically perform the alignment. Consequently, such systems are prone to being decentered by some offset, leading to challenging refraction patterns at the sphere that invalidate the pinhole camera model. We show that the overall camera system becomes an axial camera, even for thick domes as used for deep sea exploration and provide a non-iterative way to compute the center of refraction without requiring knowledge of exact air, glass or water properties. We also analyze the refractive geometry at the sphere, looking at effects such as forward- vs. backward decentering, iso-refraction curves and obtain a 6th-degree polynomial equation for forward projection of 3D points in thin domes. We then propose a pure underwater calibration procedure to estimate the decentering from multiple images. This estimate can either be used during adjustment to guide the mechanical position of the lens, or can be considered in photogrammetric underwater applications.
Deep Sea Robotic Imaging Simulator for UUV Development
Jun 27, 2020

Nowadays underwater vision systems are being widely applied in ocean research. However, the largest portion of the ocean - the deep sea - still remains mostly unexplored. Only relatively few images sets have been taken from the deep sea due to the physical limitations caused by technical challenges and enormous costs. The shortage of deep sea images and the corresponding ground truth data for evaluation and training is becoming a bottleneck for the development of underwater computer vision methods. Thus this paper presents a physical model-based image simulation solution which uses in-air and depth information as inputs to generate underwater images for robotics in deep ocean scenarios. Compared to shallow water conditions, active lighting is required to illuminate the scene in deep sea. Our radiometric image formation model considers both attenuation and scattering effects with co-moving light sources in the dark. Additionally, we also incorporate geometric distortion (refraction), which is caused by thick glass housings commonly employed in deep sea conditions. By detailed analysis and evaluation of the underwater image formation model, we propose a 3D lookup table structure in combination with a novel rendering strategy to improve simulation performance, which enables us to integrate and implement interactive deep sea robotic vision simulation in the Gazebo-based Unmanned Underwater Vehicles simulator.
Light Pose Calibration for Camera-light Vision Systems
Jun 27, 2020

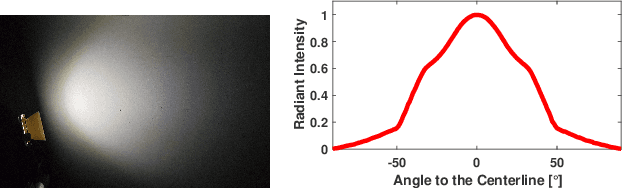
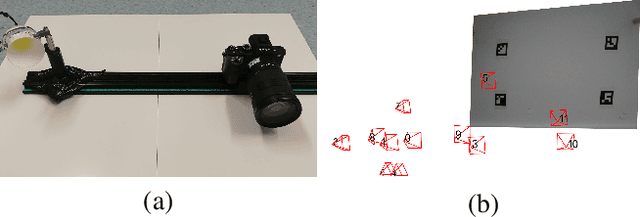
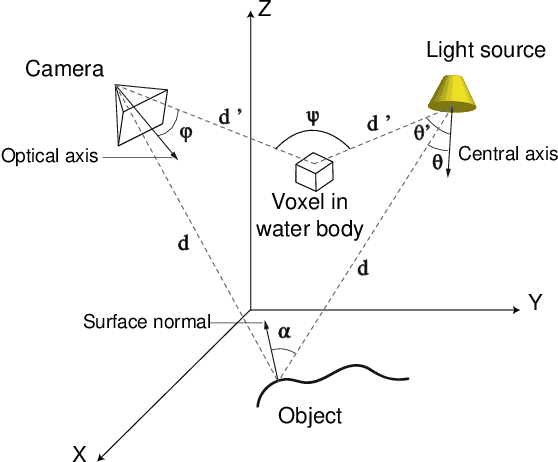
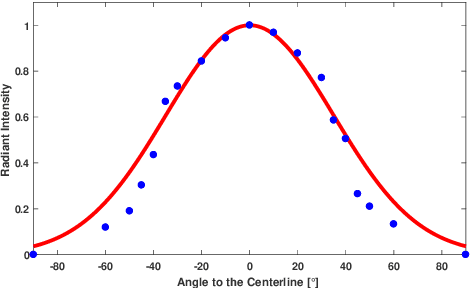
Illuminating a scene with artificial light is a prerequisite for seeing in dark environments. However, nonuniform and dynamic illumination can deteriorate or even break computer vision approaches, for instance when operating a robot with headlights in the darkness. This paper presents a novel light calibration approach by taking multi-view and -distance images of a reference plane in order to provide pose information of the employed light sources to the computer vision system. By following a physical light propagation approach, under consideration of energy preservation, the estimation of light poses is solved by minimizing of the differences between real and rendered pixel intensities. During the evaluation we show the robustness and consistency of this method by statistically analyzing the light pose estimation results with different setups. Although the results are demonstrated using a rotationally-symmetric non-isotropic light, the method is suited also for non-symmetric lights.