 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRefractive Geometry for Underwater Domes
Paper and Code
Aug 14, 2021
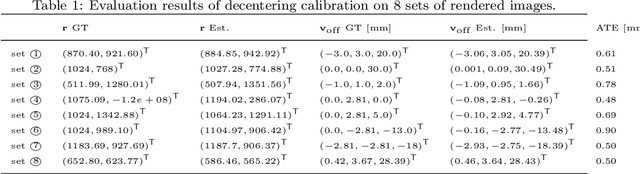
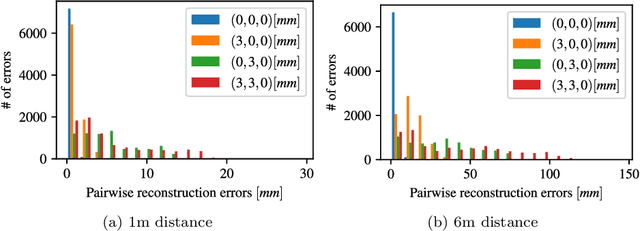

Underwater cameras are typically placed behind glass windows to protect them from the water. Spherical glass, a dome port, is well suited for high water pressures at great depth, allows for a large field of view, and avoids refraction if a pinhole camera is positioned exactly at the sphere's center. Adjusting a real lens perfectly to the dome center is a challenging task, both in terms of how to actually guide the centering process (e.g. visual servoing) and how to measure the alignment quality, but also, how to mechanically perform the alignment. Consequently, such systems are prone to being decentered by some offset, leading to challenging refraction patterns at the sphere that invalidate the pinhole camera model. We show that the overall camera system becomes an axial camera, even for thick domes as used for deep sea exploration and provide a non-iterative way to compute the center of refraction without requiring knowledge of exact air, glass or water properties. We also analyze the refractive geometry at the sphere, looking at effects such as forward- vs. backward decentering, iso-refraction curves and obtain a 6th-degree polynomial equation for forward projection of 3D points in thin domes. We then propose a pure underwater calibration procedure to estimate the decentering from multiple images. This estimate can either be used during adjustment to guide the mechanical position of the lens, or can be considered in photogrammetric underwater applications.