 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Calibration Tool for Refractive Underwater Vision
May 28, 2024



Many underwater robotic applications relying on vision sensors require proper camera calibration, i.e. knowing the incoming light ray for each pixel in the image. While for the ideal pinhole camera model all viewing rays intersect in a single 3D point, underwater cameras suffer from - possibly multiple - refractions of light rays at the interfaces of water, glass and air. These changes of direction depend on the position and orientation of the camera inside the water-proof housing, as well as on the shape and properties of the optical window, the port, itself. In recent years explicit models for underwater vision behind common ports such as flat or dome port have been proposed, but the underwater community is still lacking a calibration tool which can determine port parameters through refractive calibration. With this work we provide the first open source implementation of an underwater refractive camera calibration toolbox. It allows end-to-end calibration of underwater vision systems, including camera, stereo and housing calibration for systems with dome or flat ports. The implementation is verified using rendered datasets and real-world experiments.
Design, Implementation and Evaluation of an External Pose-Tracking System for Underwater Cameras
May 07, 2023



In order to advance underwater computer vision and robotics from lab environments and clear water scenarios to the deep dark ocean or murky coastal waters, representative benchmarks and realistic datasets with ground truth information are required. In particular, determining the camera pose is essential for many underwater robotic or photogrammetric applications and known ground truth is mandatory to evaluate the performance of e.g., simultaneous localization and mapping approaches in such extreme environments. This paper presents the conception, calibration and implementation of an external reference system for determining the underwater camera pose in real-time. The approach, based on an HTC Vive tracking system in air, calculates the underwater camera pose by fusing the poses of two controllers tracked above the water surface of a tank. It is shown that the mean deviation of this approach to an optical marker based reference in air is less than 3 mm and 0.3{\deg}. Finally, the usability of the system for underwater applications is demonstrated.
Robustly Removing Deep Sea Lighting Effects for Visual Mapping of Abyssal Plains
Oct 01, 2021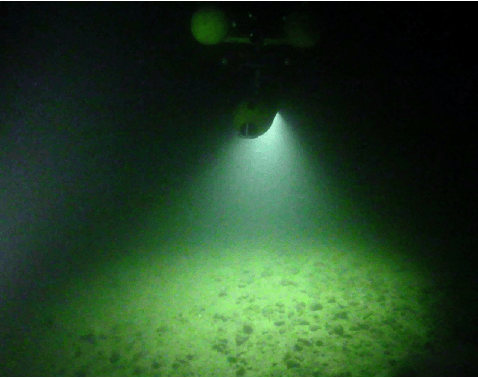
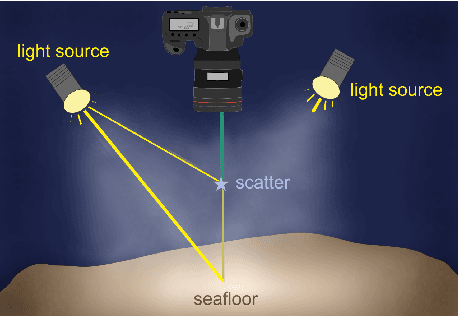
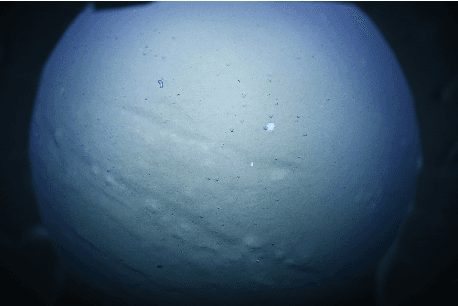
The majority of Earth's surface lies deep in the oceans, where no surface light reaches. Robots diving down to great depths must bring light sources that create moving illumination patterns in the darkness, such that the same 3D point appears with different color in each image. On top, scattering and attenuation of light in the water makes images appear foggy and typically blueish, the degradation depending on each pixel's distance to its observed seafloor patch, on the local composition of the water and the relative poses and cones of the light sources. Consequently, visual mapping, including image matching and surface albedo estimation, severely suffers from the effects that co-moving light sources produce, and larger mosaic maps from photos are often dominated by lighting effects that obscure the actual seafloor structure. In this contribution a practical approach to estimating and compensating these lighting effects on predominantly homogeneous, flat seafloor regions, as can be found in the Abyssal plains of our oceans, is presented. The method is essentially parameter-free and intended as a preprocessing step to facilitate visual mapping, but already produces convincing lighting artefact compensation up to a global white balance factor. It does not require to be trained beforehand on huge sets of annotated images, which are not available for the deep sea. Rather, we motivate our work by physical models of light propagation, perform robust statistics-based estimates of additive and multiplicative nuisances that avoid explicit parameters for light, camera, water or scene, discuss the breakdown point of the algorithms and show results on imagery captured by robots in several kilometer water depth.