 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Sea Robotic Imaging Simulator for UUV Development
Paper and Code
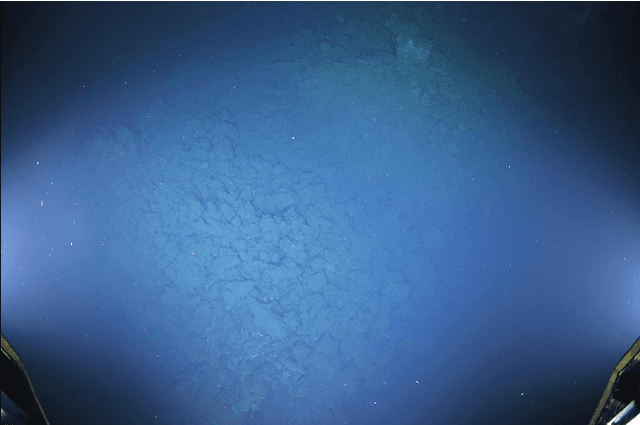
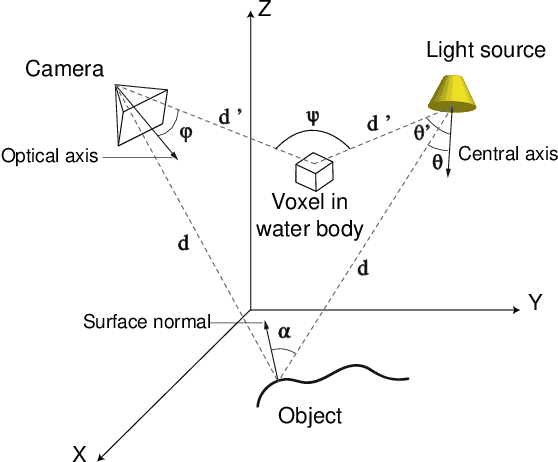
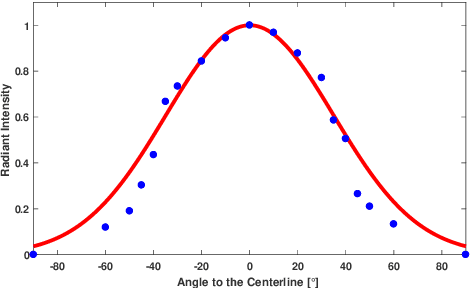

Nowadays underwater vision systems are being widely applied in ocean research. However, the largest portion of the ocean - the deep sea - still remains mostly unexplored. Only relatively few images sets have been taken from the deep sea due to the physical limitations caused by technical challenges and enormous costs. The shortage of deep sea images and the corresponding ground truth data for evaluation and training is becoming a bottleneck for the development of underwater computer vision methods. Thus this paper presents a physical model-based image simulation solution which uses in-air and depth information as inputs to generate underwater images for robotics in deep ocean scenarios. Compared to shallow water conditions, active lighting is required to illuminate the scene in deep sea. Our radiometric image formation model considers both attenuation and scattering effects with co-moving light sources in the dark. Additionally, we also incorporate geometric distortion (refraction), which is caused by thick glass housings commonly employed in deep sea conditions. By detailed analysis and evaluation of the underwater image formation model, we propose a 3D lookup table structure in combination with a novel rendering strategy to improve simulation performance, which enables us to integrate and implement interactive deep sea robotic vision simulation in the Gazebo-based Unmanned Underwater Vehicles simulator.