 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderstanding the Domain Gap in LiDAR Object Detection Networks
Apr 21, 2022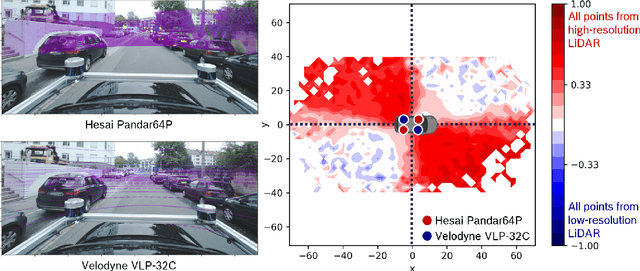
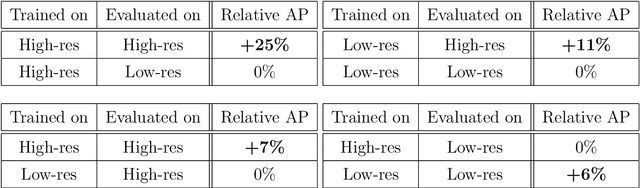
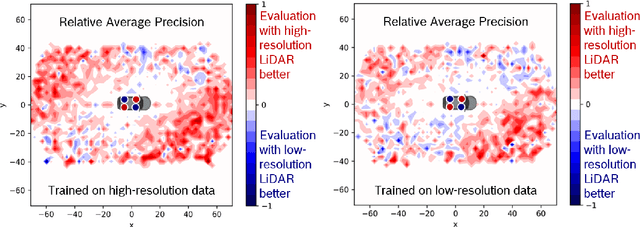
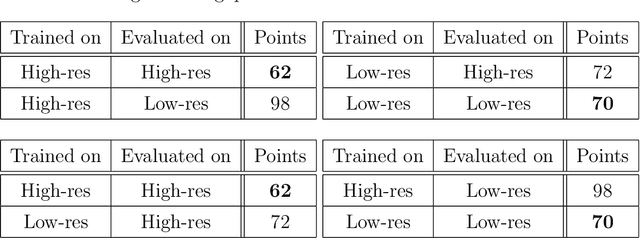
In order to make autonomous driving a reality, artificial neural networks have to work reliably in the open-world. However, the open-world is vast and continuously changing, so it is not technically feasible to collect and annotate training datasets which accurately represent this domain. Therefore, there are always domain gaps between training datasets and the open-world which must be understood. In this work, we investigate the domain gaps between high-resolution and low-resolution LiDAR sensors in object detection networks. Using a unique dataset, which enables us to study sensor resolution domain gaps independent of other effects, we show two distinct domain gaps - an inference domain gap and a training domain gap. The inference domain gap is characterised by a strong dependence on the number of LiDAR points per object, while the training gap shows no such dependence. These fndings show that different approaches are required to close these inference and training domain gaps.
Can We Trust You? On Calibration of a Probabilistic Object Detector for Autonomous Driving
Sep 26, 2019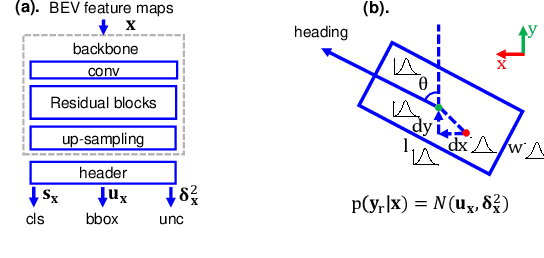
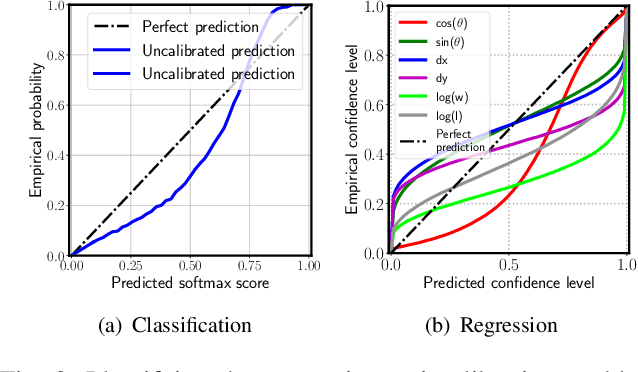
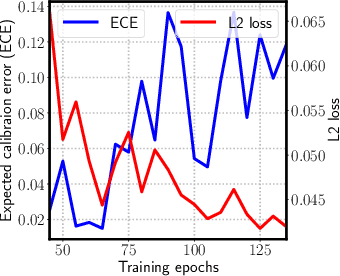
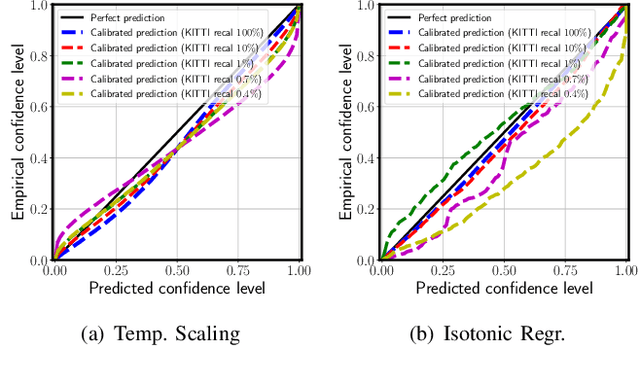
Reliable uncertainty estimation is crucial for perception systems in safe autonomous driving. Recently, many methods have been proposed to model uncertainties in deep learning based object detectors. However, the estimated probabilities are often uncalibrated, which may lead to severe problems in safety critical scenarios. In this work, we identify such uncertainty miscalibration problems in a probabilistic LiDAR 3D object detection network, and propose three practical methods to significantly reduce errors in uncertainty calibration. Extensive experiments on several datasets show that our methods produce well-calibrated uncertainties, and generalize well between different datasets.
Motion Estimation in Occupancy Grid Maps in Stationary Settings Using Recurrent Neural Networks
Sep 25, 2019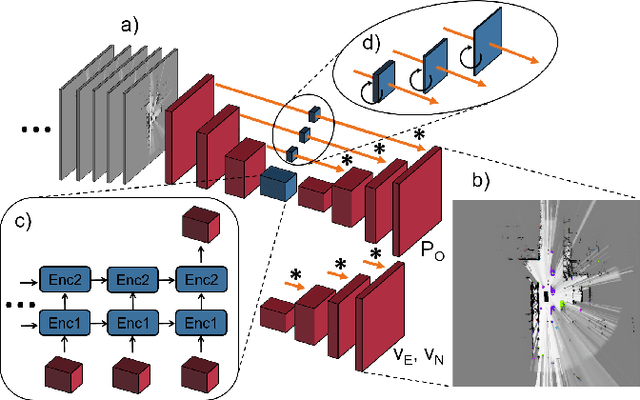
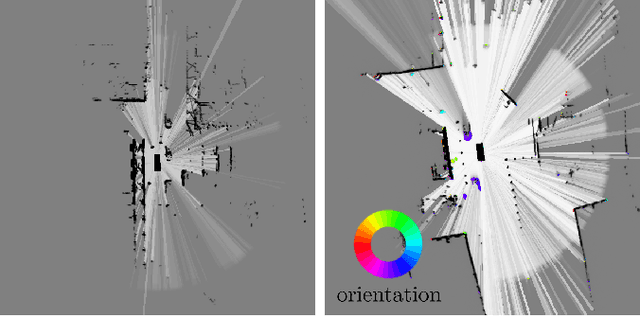
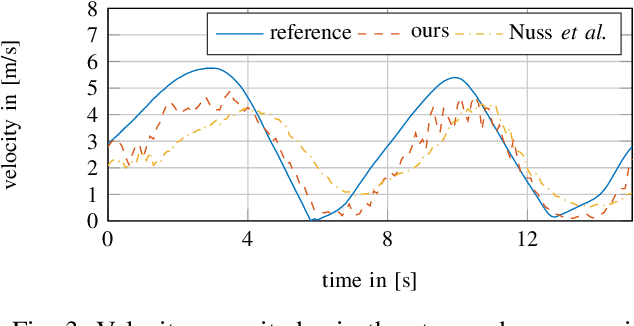
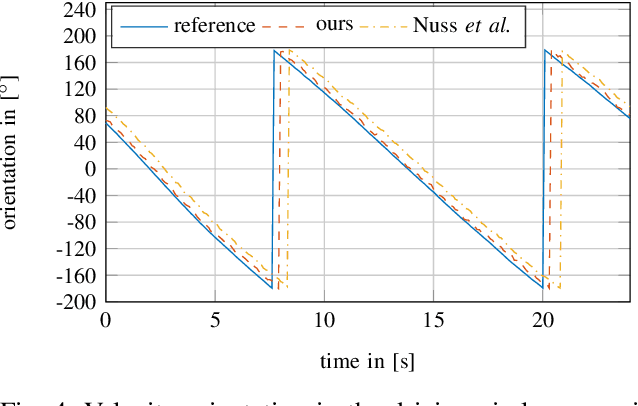
In this work, we tackle the problem of modeling the vehicle environment as dynamic occupancy grid map in complex urban scenarios using recurrent neural networks. Dynamic occupancy grid maps represent the scene in a bird's eye view, where each grid cell contains the occupancy probability and the two dimensional velocity. As input data, our approach relies on measurement grid maps, which contain occupancy probabilities, generated with lidar measurements. Given this configuration, we propose a recurrent neural network architecture to predict a dynamic occupancy grid map, i.e. filtered occupancy and velocity of each cell, by using a sequence of measurement grid maps. Our network architecture contains convolutional long-short term memories in order to sequentially process the input, makes use of spatial context, and captures motion. In the evaluation, we quantify improvements in estimating the velocity of braking and turning vehicles compared to the state-of-the-art. Additionally, we demonstrate that our approach provides more consistent velocity estimates for dynamic objects, as well as, less erroneous velocity estimates in static area.
Deep Multi-modal Object Detection and Semantic Segmentation for Autonomous Driving: Datasets, Methods, and Challenges
Feb 21, 2019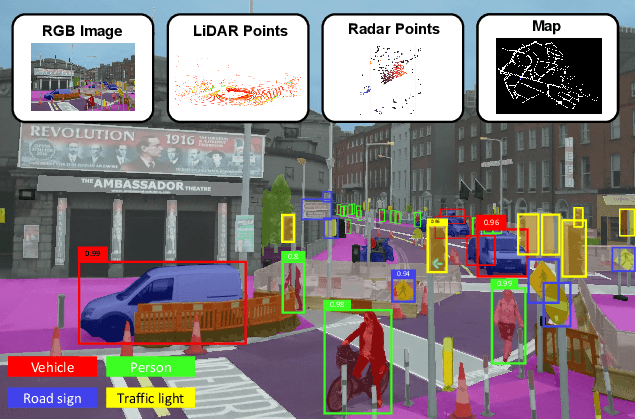
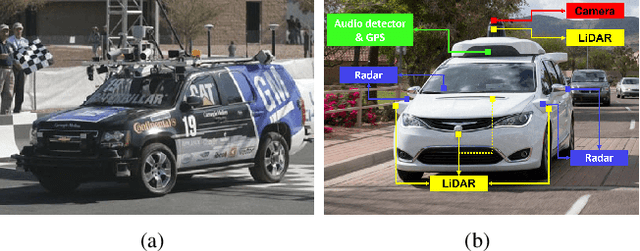
Recent advancements in the perception for autonomous driving are driven by deep learning. In order to achieve the robust and accurate scene understanding, autonomous vehicles are usually equipped with different sensors (e.g. cameras, LiDARs, Radars), and multiple sensing modalities can be fused to exploit their complementary properties. In this context, many methods have been proposed for deep multi-modal perception problems. However, there is no general guideline for network architecture design, and questions of "what to fuse", "when to fuse", and "how to fuse" remain open. This review paper attempts to systematically summarize methodologies and discuss challenges for deep multi-modal object detection and semantic segmentation in autonomous driving. To this end, we first provide an overview of on-board sensors on test vehicles, open datasets and the background information of object detection and semantic segmentation for the autonomous driving research. We then summarize the fusion methodologies and discuss challenges and open questions. In the appendix, we provide tables that summarize topics and methods. We also provide an interactive online platform to navigate each reference: https://multimodalperception.github.io.