 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNextBestPath: Efficient 3D Mapping of Unseen Environments
Feb 07, 2025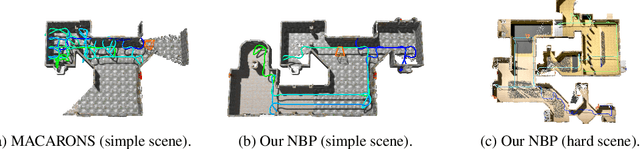

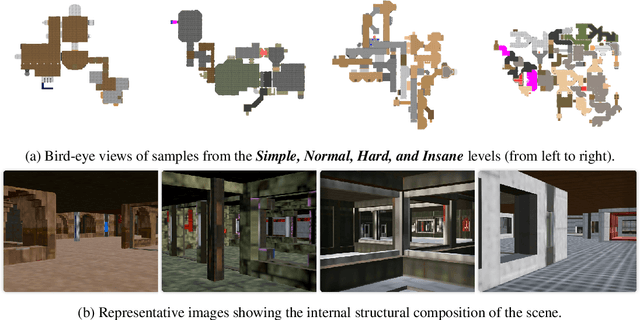
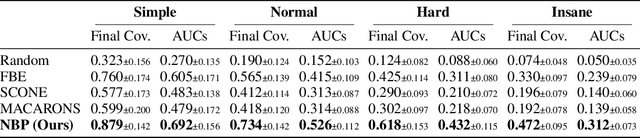
This work addresses the problem of active 3D mapping, where an agent must find an efficient trajectory to exhaustively reconstruct a new scene. Previous approaches mainly predict the next best view near the agent's location, which is prone to getting stuck in local areas. Additionally, existing indoor datasets are insufficient due to limited geometric complexity and inaccurate ground truth meshes. To overcome these limitations, we introduce a novel dataset AiMDoom with a map generator for the Doom video game, enabling to better benchmark active 3D mapping in diverse indoor environments. Moreover, we propose a new method we call next-best-path (NBP), which predicts long-term goals rather than focusing solely on short-sighted views. The model jointly predicts accumulated surface coverage gains for long-term goals and obstacle maps, allowing it to efficiently plan optimal paths with a unified model. By leveraging online data collection, data augmentation and curriculum learning, NBP significantly outperforms state-of-the-art methods on both the existing MP3D dataset and our AiMDoom dataset, achieving more efficient mapping in indoor environments of varying complexity.
From 2D to 3D: AISG-SLA Visual Localization Challenge
Jul 26, 2024



Research in 3D mapping is crucial for smart city applications, yet the cost of acquiring 3D data often hinders progress. Visual localization, particularly monocular camera position estimation, offers a solution by determining the camera's pose solely through visual cues. However, this task is challenging due to limited data from a single camera. To tackle these challenges, we organized the AISG-SLA Visual Localization Challenge (VLC) at IJCAI 2023 to explore how AI can accurately extract camera pose data from 2D images in 3D space. The challenge attracted over 300 participants worldwide, forming 50+ teams. Winning teams achieved high accuracy in pose estimation using images from a car-mounted camera with low frame rates. The VLC dataset is available for research purposes upon request via vlc-dataset@aisingapore.org.
Eiffel Tower: A Deep-Sea Underwater Dataset for Long-Term Visual Localization
May 09, 2023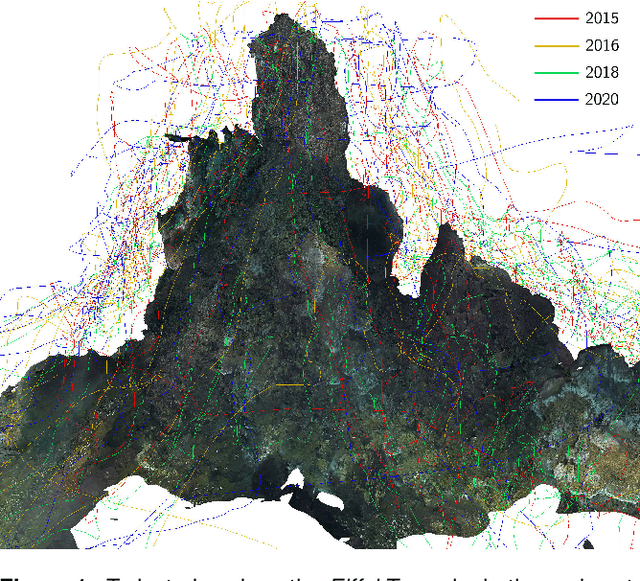
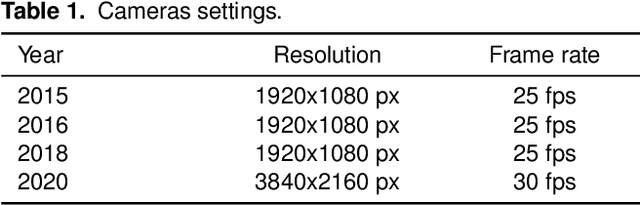
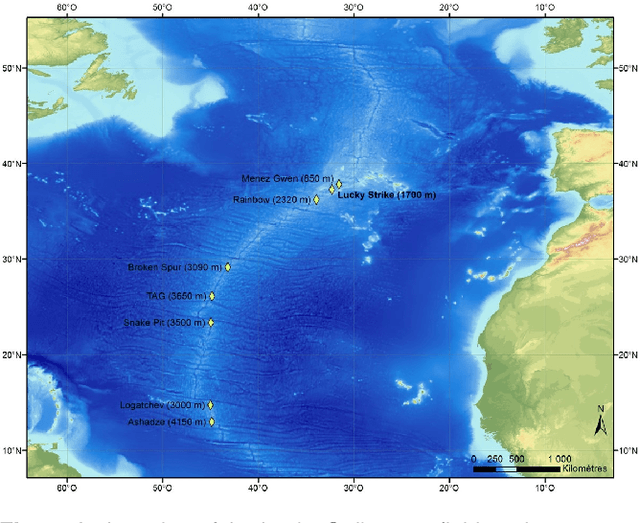

Visual localization plays an important role in the positioning and navigation of robotics systems within previously visited environments. When visits occur over long periods of time, changes in the environment related to seasons or day-night cycles present a major challenge. Under water, the sources of variability are due to other factors such as water conditions or growth of marine organisms. Yet it remains a major obstacle and a much less studied one, partly due to the lack of data. This paper presents a new deep-sea dataset to benchmark underwater long-term visual localization. The dataset is composed of images from four visits to the same hydrothermal vent edifice over the course of five years. Camera poses and a common geometry of the scene were estimated using navigation data and Structure-from-Motion. This serves as a reference when evaluating visual localization techniques. An analysis of the data provides insights about the major changes observed throughout the years. Furthermore, several well-established visual localization methods are evaluated on the dataset, showing there is still room for improvement in underwater long-term visual localization. The data is made publicly available at https://www.seanoe.org/data/00810/92226/.
SUCRe: Leveraging Scene Structure for Underwater Color Restoration
Dec 18, 2022Underwater images are altered by the physical characteristics of the medium through which light rays pass before reaching the optical sensor. Scattering and strong wavelength-dependent absorption significantly modify the captured colors depending on the distance of observed elements to the image plane. In this paper, we aim to recover the original colors of the scene as if the water had no effect on them. We propose two novel methods that rely on different sets of inputs. The first assumes that pixel intensities in the restored image are normally distributed within each color channel, leading to an alternative optimization of the well-known \textit{Sea-thru} method which acts on single images and their distance maps. We additionally introduce SUCRe, a new method that further exploits the scene's 3D Structure for Underwater Color Restoration. By following points in multiple images and tracking their intensities at different distances to the sensor we constrain the optimization of the image formation model parameters. When compared to similar existing approaches, SUCRe provides clear improvements in a variety of scenarios ranging from natural light to deep-sea environments. The code for both approaches is publicly available at https://github.com/clementinboittiaux/sucre .
Homography-Based Loss Function for Camera Pose Regression
May 04, 2022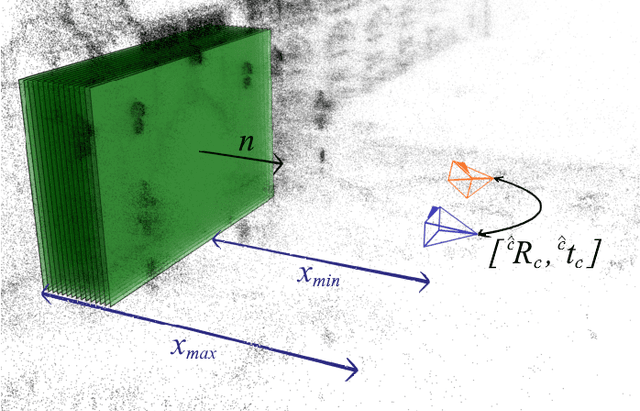
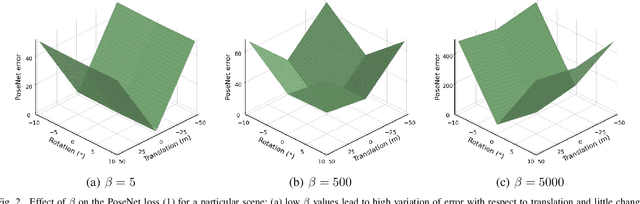
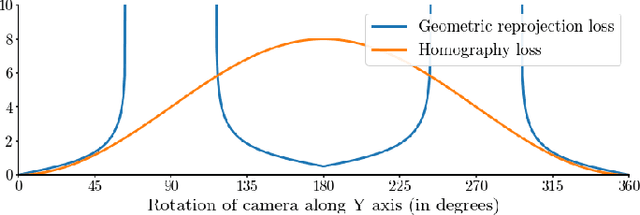
Some recent visual-based relocalization algorithms rely on deep learning methods to perform camera pose regression from image data. This paper focuses on the loss functions that embed the error between two poses to perform deep learning based camera pose regression. Existing loss functions are either difficult-to-tune multi-objective functions or present unstable reprojection errors that rely on ground truth 3D scene points and require a two-step training. To deal with these issues, we introduce a novel loss function which is based on a multiplane homography integration. This new function does not require prior initialization and only depends on physically interpretable hyperparameters. Furthermore, the experiments carried out on well established relocalization datasets show that it minimizes best the mean square reprojection error during training when compared with existing loss functions.