 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContrastive Learning for Enhancing Robust Scene Transfer in Vision-based Agile Flight
Sep 29, 2023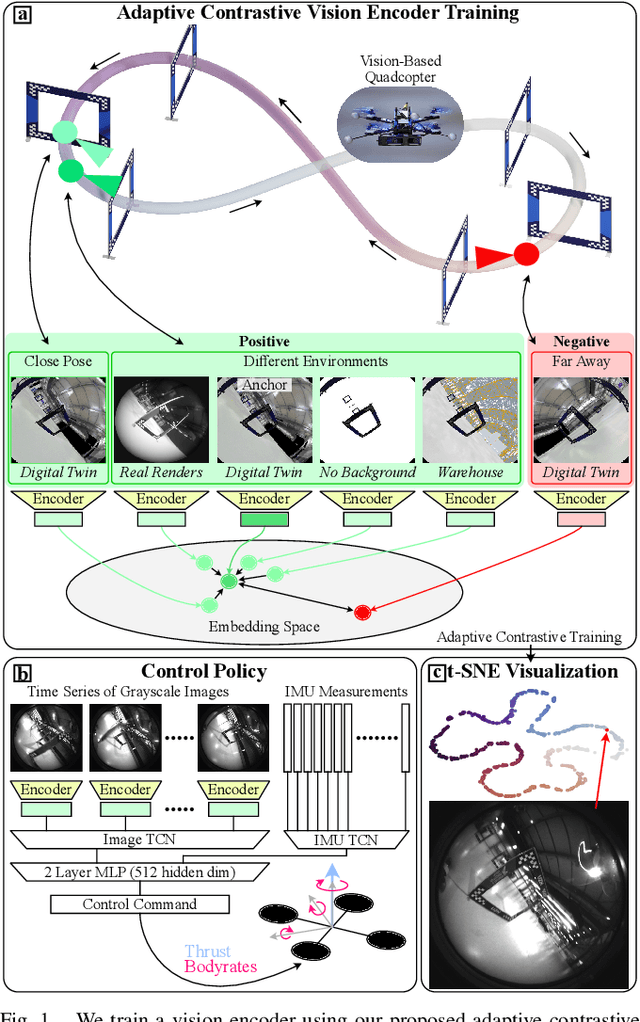
Scene transfer for vision-based mobile robotics applications is a highly relevant and challenging problem. The utility of a robot greatly depends on its ability to perform a task in the real world, outside of a well-controlled lab environment. Existing scene transfer end-to-end policy learning approaches often suffer from poor sample efficiency or limited generalization capabilities, making them unsuitable for mobile robotics applications. This work proposes an adaptive multi-pair contrastive learning strategy for visual representation learning that enables zero-shot scene transfer and real-world deployment. Control policies relying on the embedding are able to operate in unseen environments without the need for finetuning in the deployment environment. We demonstrate the performance of our approach on the task of agile, vision-based quadrotor flight. Extensive simulation and real-world experiments demonstrate that our approach successfully generalizes beyond the training domain and outperforms all baselines.
Descriptellation: Deep Learned Constellation Descriptors for SLAM
Mar 01, 2022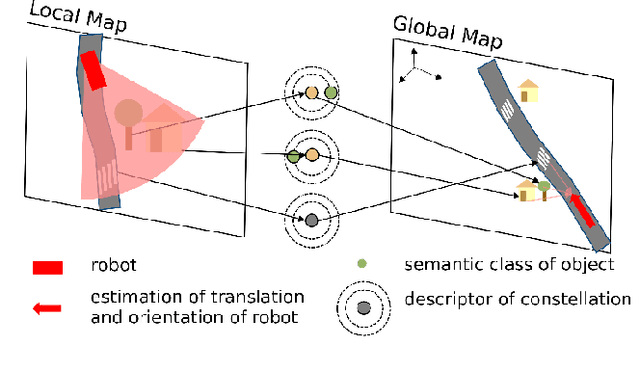
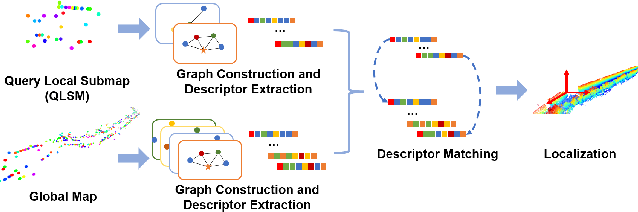
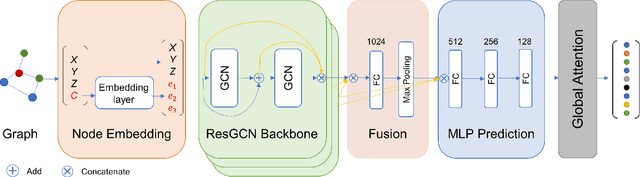
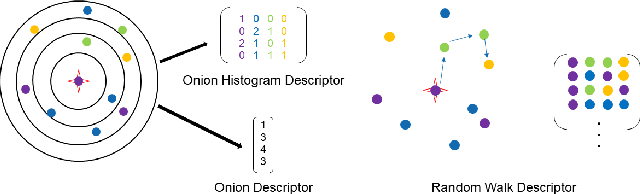
Current global localization descriptors in Simultaneous Localization and Mapping (SLAM) often fail under vast viewpoint or appearance changes. Adding topological information of semantic objects into the descriptors ameliorates the problem. However, hand-crafted topological descriptors extract limited information and they are not robust to environmental noise, drastic perspective changes, or object occlusion or misdetections. To solve this problem, we formulate a learning-based approach by constructing constellations from semantically meaningful objects and use Deep Graph Convolution Networks to map the constellation representation to a descriptor. We demonstrate the effectiveness of our Deep Learned Constellation Descriptor (Descriptellation) on the Paris-Rue-Lille and IQmulus datasets. Although Descriptellation is trained on randomly generated simulation datasets, it shows good generalization abilities on real-world datasets. Descriptellation outperforms the PointNet and handcrafted constellation descriptors for global localization, and shows robustness against different types of noise.