 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShared Certificates for Neural Network Verification
Sep 14, 2021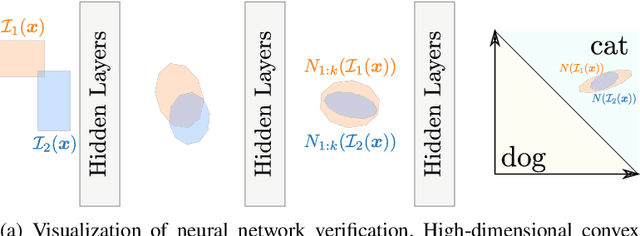
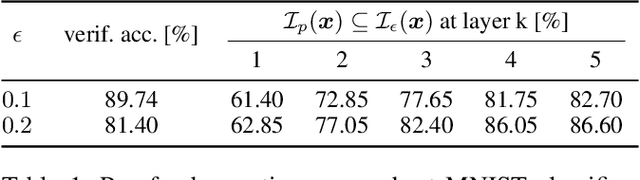
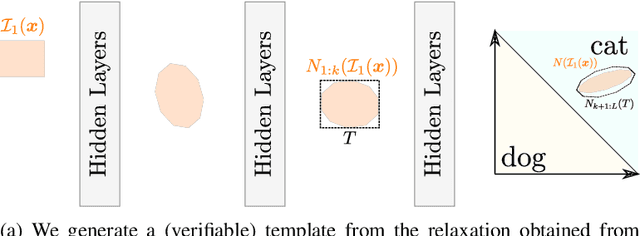

Existing neural network verifiers compute a proof that each input is handled correctly under a given perturbation by propagating a convex set of reachable values at each layer. This process is repeated independently for each input (e.g., image) and perturbation (e.g., rotation), leading to an expensive overall proof effort when handling an entire dataset. In this work we introduce a new method for reducing this verification cost based on the key insight that convex sets obtained at intermediate layers can overlap across different inputs and perturbations. Leveraging this insight, we introduce the general concept of shared certificates, enabling proof effort reuse across multiple inputs and driving down overall verification costs. We validate our insight via an extensive experimental evaluation and demonstrate the effectiveness of shared certificates on a range of datasets and attack specifications including geometric, patch and $\ell_\infty$ input perturbations.
Voliro: An Omnidirectional Hexacopter With Tiltable Rotors
Jan 14, 2018
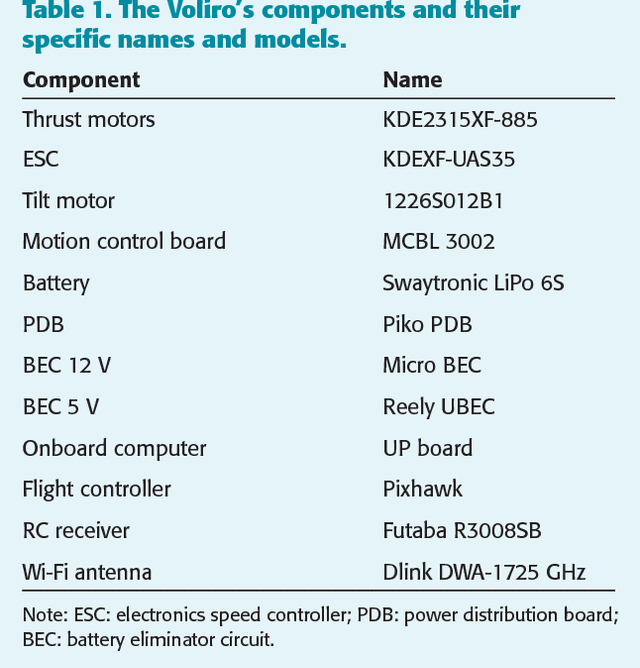
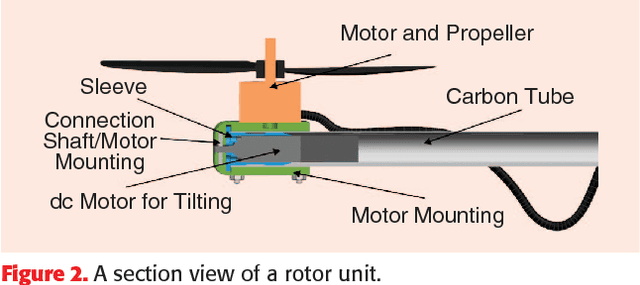
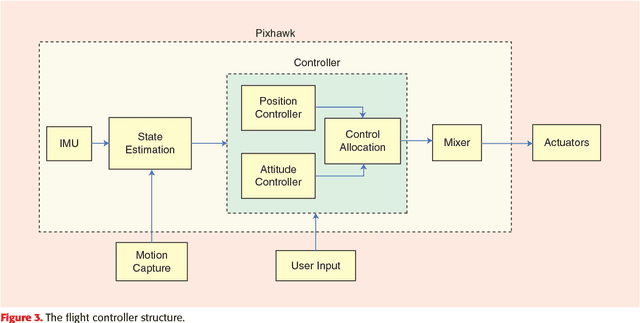
Extending the maneuverability of unmanned areal vehicles promises to yield a considerable increase in the areas in which these systems can be used. Some such applications are the performance of more complicated inspection tasks and the generation of complex uninterrupted movements of an attached camera. In this paper we address this challenge by presenting Voliro, a novel aerial platform that combines the advantages of existing multi-rotor systems with the agility of omnidirectionally controllable platforms. We propose the use of a hexacopter with tiltable rotors allowing the system to decouple the control of position and orientation. The contributions of this work involve the mechanical design as well as a controller with the corresponding allocation scheme. This work also discusses the design challenges involved when turning the concept of a hexacopter with tiltable rotors into an actual prototype. The agility of the system is demonstrated and evaluated in real- world experiments.