 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Affordances from Interactive Exploration using an Object-level Map
Jan 10, 2025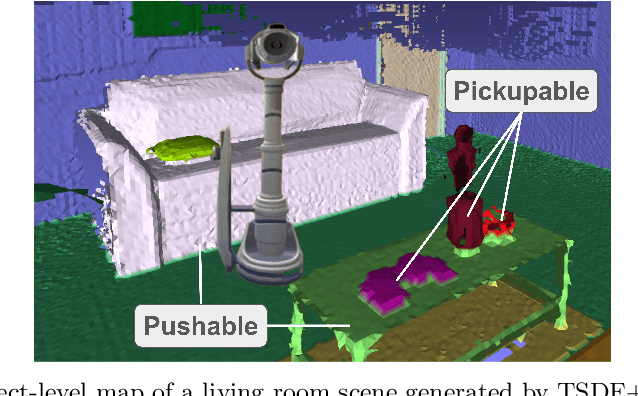
Many robotic tasks in real-world environments require physical interactions with an object such as pick up or push. For successful interactions, the robot needs to know the object's affordances, which are defined as the potential actions the robot can perform with the object. In order to learn a robot-specific affordance predictor, we propose an interactive exploration pipeline which allows the robot to collect interaction experiences while exploring an unknown environment. We integrate an object-level map in the exploration pipeline such that the robot can identify different object instances and track objects across diverse viewpoints. This results in denser and more accurate affordance annotations compared to state-of-the-art methods, which do not incorporate a map. We show that our affordance exploration approach makes exploration more efficient and results in more accurate affordance prediction models compared to baseline methods.
Learning Agent-Aware Affordances for Closed-Loop Interaction with Articulated Objects
Sep 14, 2022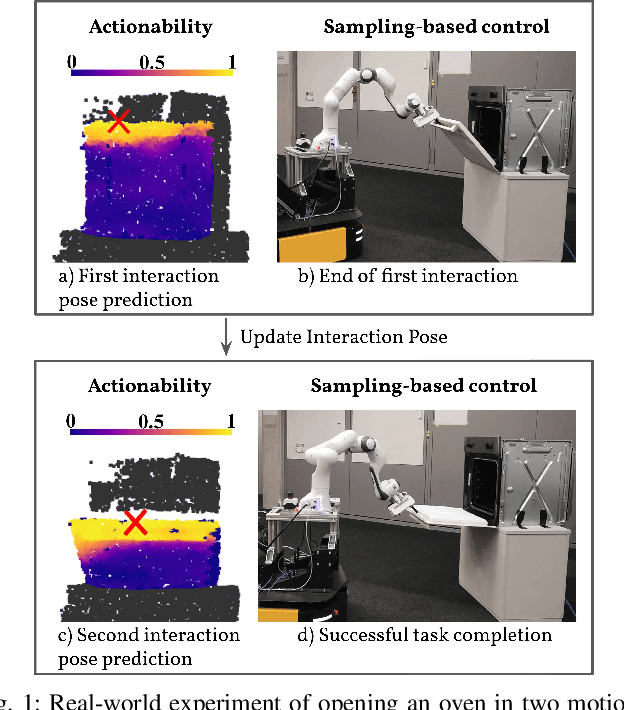

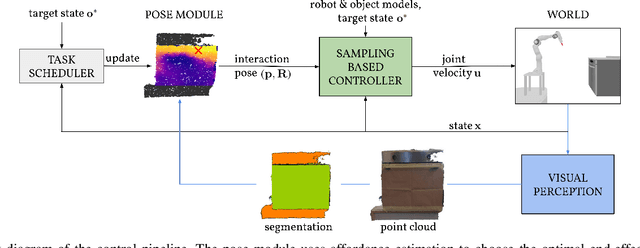
Interactions with articulated objects are a challenging but important task for mobile robots. To tackle this challenge, we propose a novel closed-loop control pipeline, which integrates manipulation priors from affordance estimation with sampling-based whole-body control. We introduce the concept of agent-aware affordances which fully reflect the agent's capabilities and embodiment and we show that they outperform their state-of-the-art counterparts which are only conditioned on the end-effector geometry. Additionally, closed-loop affordance inference is found to allow the agent to divide a task into multiple non-continuous motions and recover from failure and unexpected states. Finally, the pipeline is able to perform long-horizon mobile manipulation tasks, i.e. opening and closing an oven, in the real world with high success rates (opening: 71%, closing: 72%).
Voliro: An Omnidirectional Hexacopter With Tiltable Rotors
Jan 14, 2018
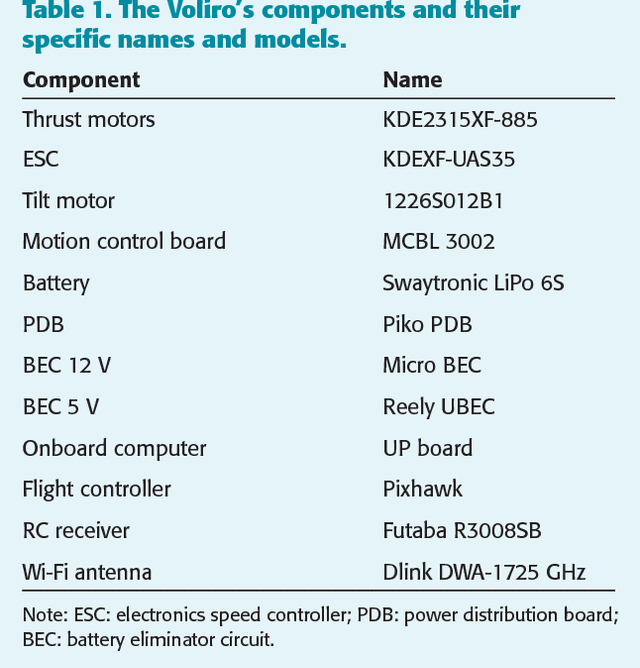
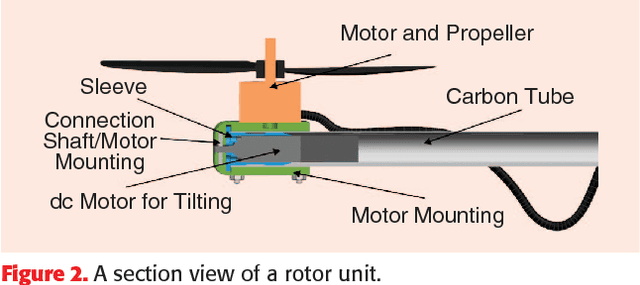
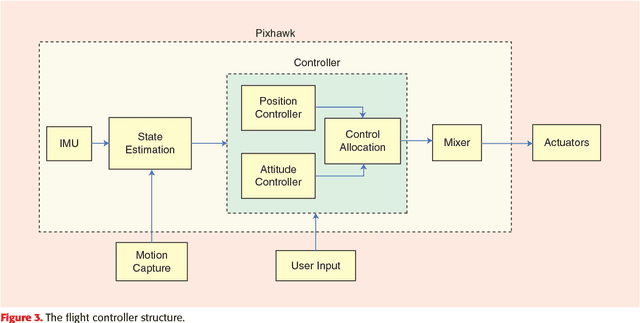
Extending the maneuverability of unmanned areal vehicles promises to yield a considerable increase in the areas in which these systems can be used. Some such applications are the performance of more complicated inspection tasks and the generation of complex uninterrupted movements of an attached camera. In this paper we address this challenge by presenting Voliro, a novel aerial platform that combines the advantages of existing multi-rotor systems with the agility of omnidirectionally controllable platforms. We propose the use of a hexacopter with tiltable rotors allowing the system to decouple the control of position and orientation. The contributions of this work involve the mechanical design as well as a controller with the corresponding allocation scheme. This work also discusses the design challenges involved when turning the concept of a hexacopter with tiltable rotors into an actual prototype. The agility of the system is demonstrated and evaluated in real- world experiments.