 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAttitude- and Cruise Control of a VTOL Tiltwing UAV
Mar 25, 2019
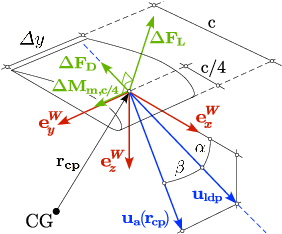
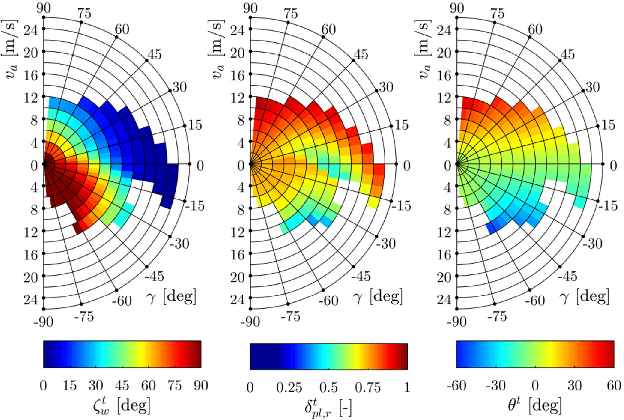
This paper presents the mathematical modeling, controller design, and flight-testing of an over-actuated Vertical Take-off and Landing (VTOL) tiltwing Unmanned Aerial Vehicle (UAV). Based on simplified aerodynamics and first-principles, a dynamical model of the UAV is developed which captures key aerodynamic effects including propeller slipstream on the wing and post-stall characteristics of the airfoils. The model-based steady-state flight envelope and the corresponding trim-actuation is analyzed and the overactuation of the UAV solved by optimizing for, e.g., power-optimal trims. The developed control system is composed of two controllers: First, a low-level attitude controller based on dynamic inversion and a daisy-chaining approach to handle allocation of redundant actuators. Secondly, a higher-level cruise controller to track a desired vertical velocity. It is based on a linearization of the system and look-up tables to determine the strong and nonlinear variation of the trims throughout the flight-envelope. We demonstrate the performance of the control-system for all flight phases (hover, transition, cruise) in extensive flight-tests.
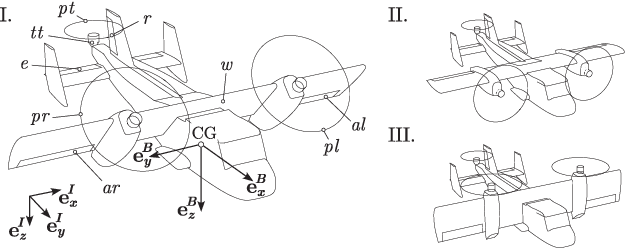
Voliro: An Omnidirectional Hexacopter With Tiltable Rotors
Jan 14, 2018
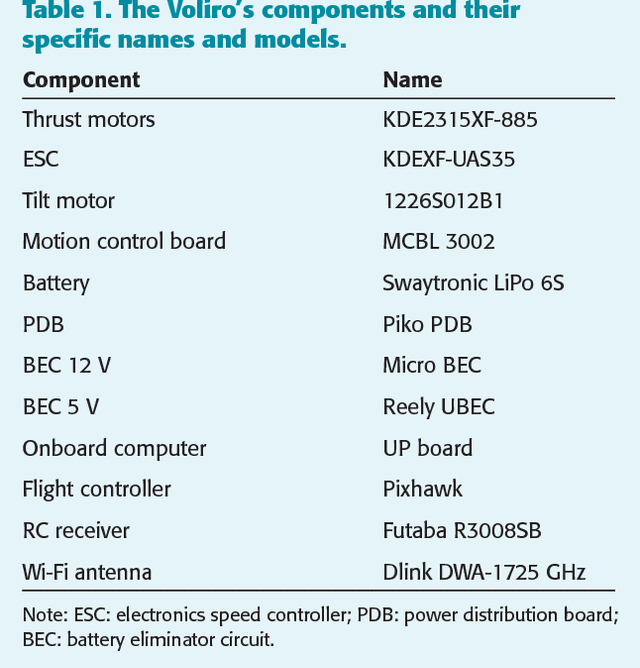
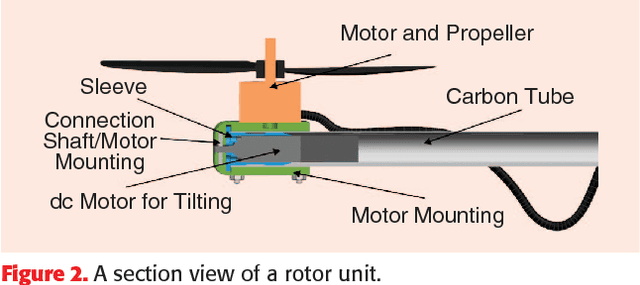
Extending the maneuverability of unmanned areal vehicles promises to yield a considerable increase in the areas in which these systems can be used. Some such applications are the performance of more complicated inspection tasks and the generation of complex uninterrupted movements of an attached camera. In this paper we address this challenge by presenting Voliro, a novel aerial platform that combines the advantages of existing multi-rotor systems with the agility of omnidirectionally controllable platforms. We propose the use of a hexacopter with tiltable rotors allowing the system to decouple the control of position and orientation. The contributions of this work involve the mechanical design as well as a controller with the corresponding allocation scheme. This work also discusses the design challenges involved when turning the concept of a hexacopter with tiltable rotors into an actual prototype. The agility of the system is demonstrated and evaluated in real- world experiments.
Collaborative Object Transportation Using MAVs via Passive Force Control
Dec 15, 2016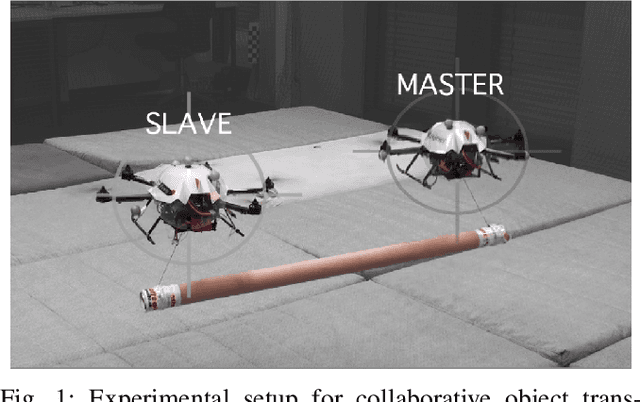
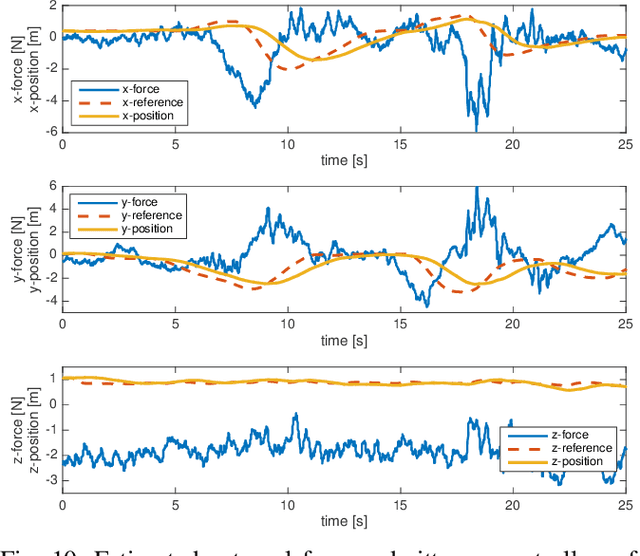

This paper shows a strategy based on passive force control for collaborative object transportation using Micro Aerial Vehicles (MAVs), focusing on the transportation of a bulky object by two hexacopters. The goal is to develop a robust approach which does not rely on: (a) communication links between the MAVs, (b) the knowledge of the payload shape and (c) the position of grasping point. The proposed approach is based on the master-slave paradigm, in which the slave agent guarantees compliance to the external force applied by the master to the payload via an admittance controller. The external force acting on the slave is estimated using a non-linear estimator based on the Unscented Kalman Filter (UKF) from the information provided by a visual inertial navigation system. Experimental results demonstrate the performance of the force estimator and show the collaborative transportation of a 1.2 m long object.