 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLQR-Assisted Whole-Body Control of a Wheeled Bipedal Robot with Kinematic Loops
May 23, 2020
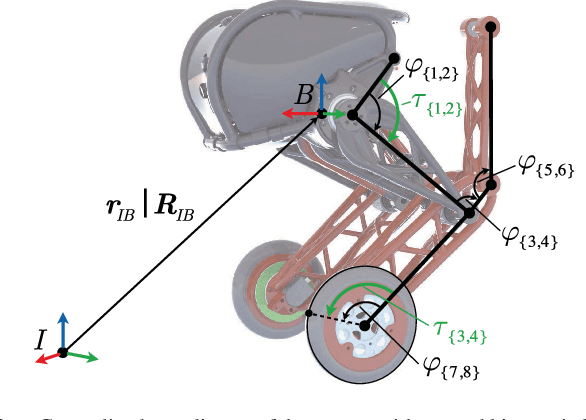
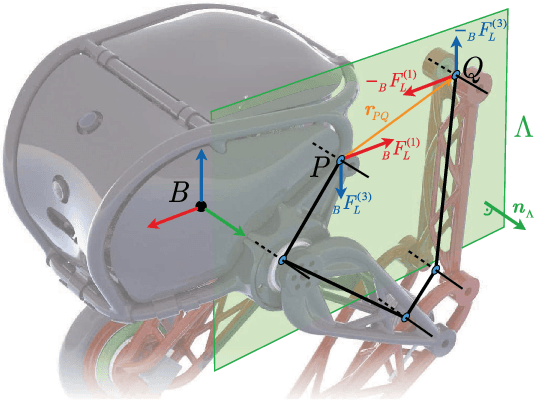
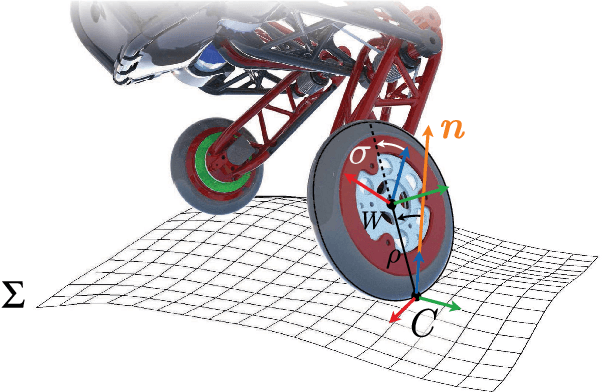
We present a hierarchical whole-body controller leveraging the full rigid body dynamics of the wheeled bipedal robot Ascento. We derive closed-form expressions for the dynamics of its kinematic loops in a way that readily generalizes to more complex systems. The rolling constraint is incorporated using a compact analytic solution based on rotation matrices. The non-minimum phase balancing dynamics are accounted for by including a linear-quadratic regulator as a motion task. Robustness when driving curves is increased by regulating the lean angle as a function of the zero-moment point. The proposed controller is computationally lightweight and significantly extends the rough-terrain capabilities and robustness of the system, as we demonstrate in several experiments.
* 8 pages, 10 figures, RA-L/ICRA 2020
Attitude- and Cruise Control of a VTOL Tiltwing UAV
Mar 25, 2019
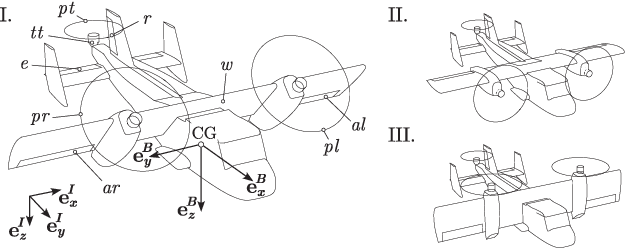
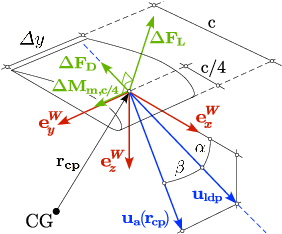
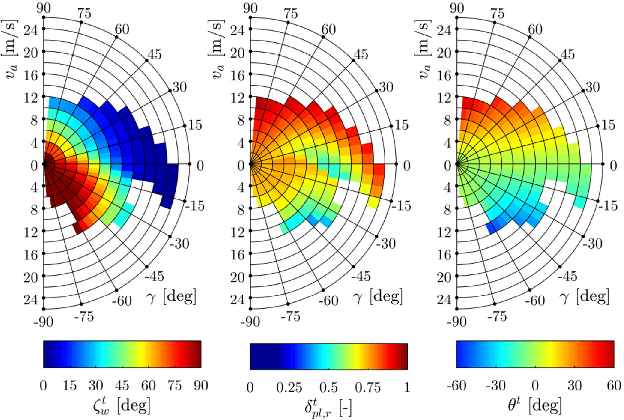
This paper presents the mathematical modeling, controller design, and flight-testing of an over-actuated Vertical Take-off and Landing (VTOL) tiltwing Unmanned Aerial Vehicle (UAV). Based on simplified aerodynamics and first-principles, a dynamical model of the UAV is developed which captures key aerodynamic effects including propeller slipstream on the wing and post-stall characteristics of the airfoils. The model-based steady-state flight envelope and the corresponding trim-actuation is analyzed and the overactuation of the UAV solved by optimizing for, e.g., power-optimal trims. The developed control system is composed of two controllers: First, a low-level attitude controller based on dynamic inversion and a daisy-chaining approach to handle allocation of redundant actuators. Secondly, a higher-level cruise controller to track a desired vertical velocity. It is based on a linearization of the system and look-up tables to determine the strong and nonlinear variation of the trims throughout the flight-envelope. We demonstrate the performance of the control-system for all flight phases (hover, transition, cruise) in extensive flight-tests.