 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeI-Planner: Intention-Aware Motion Planning Using Learning Based Human Motion Prediction
Nov 27, 2017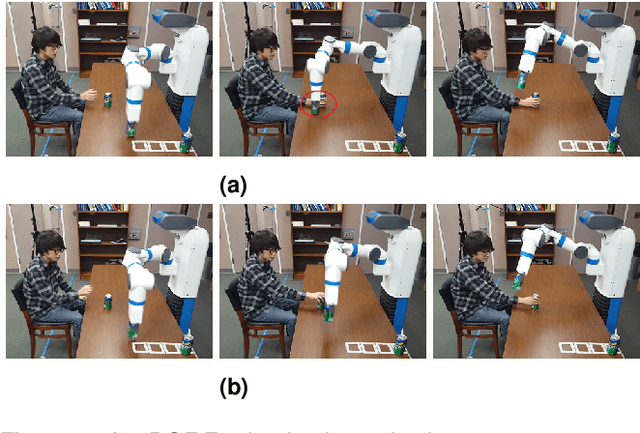
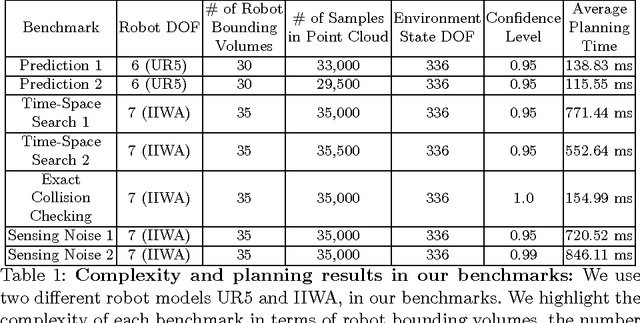
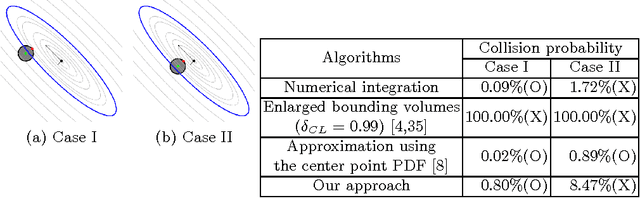
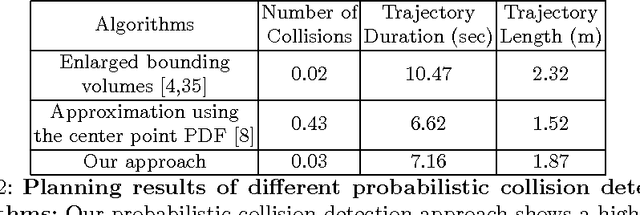
We present a motion planning algorithm to compute collision-free and smooth trajectories for high-DOF robots interacting with humans in a shared workspace. Our approach uses offline learning of human actions along with temporal coherence to predict the human actions. Our intention-aware online planning algorithm uses the learned database to compute a reliable trajectory based on the predicted actions. We represent the predicted human motion using a Gaussian distribution and compute tight upper bounds on collision probabilities for safe motion planning. We also describe novel techniques to account for noise in human motion prediction. We highlight the performance of our planning algorithm in complex simulated scenarios and real world benchmarks with 7-DOF robot arms operating in a workspace with a human performing complex tasks. We demonstrate the benefits of our intention-aware planner in terms of computing safe trajectories in such uncertain environments.
Efficient Probabilistic Collision Detection for Non-Convex Shapes
Oct 12, 2016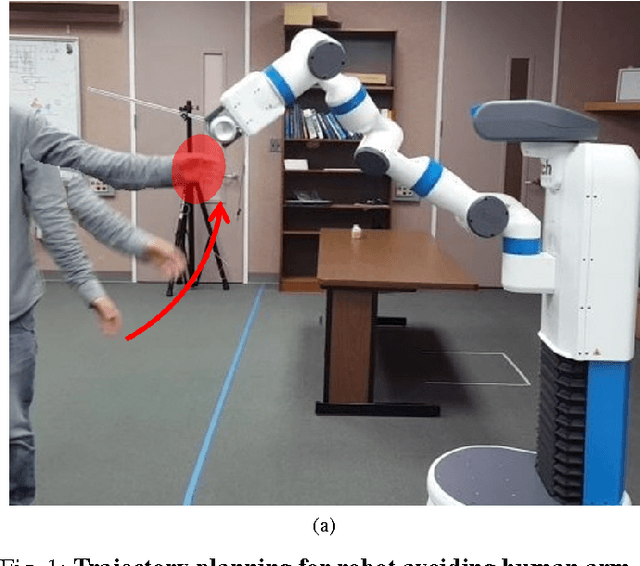
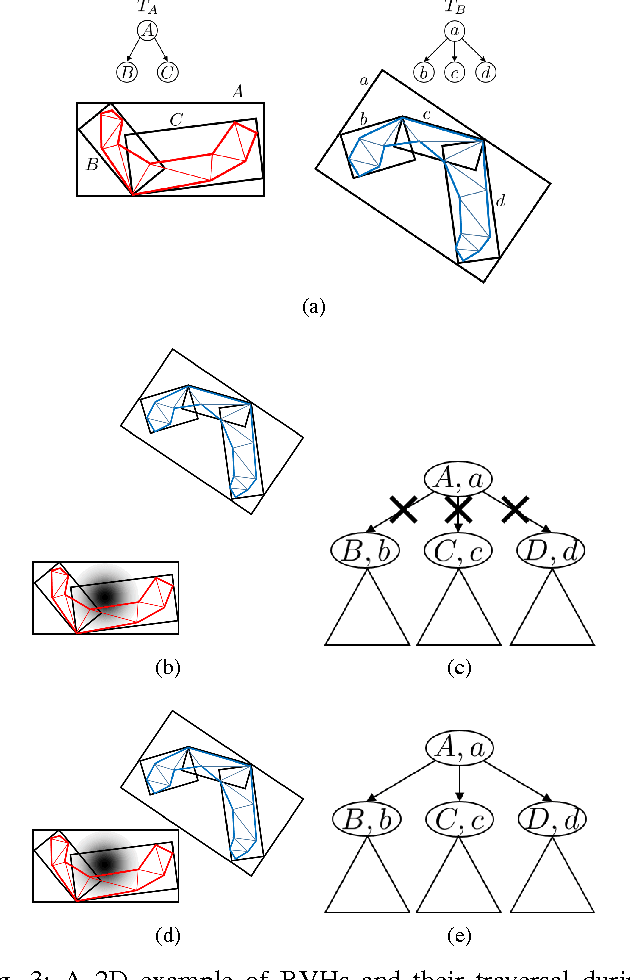
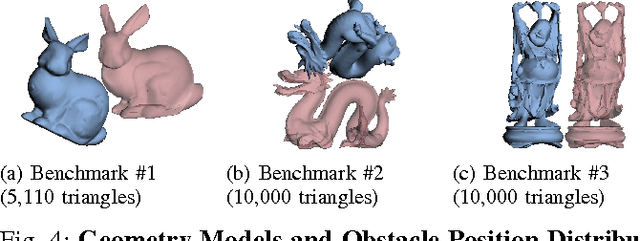
We present new algorithms to perform fast probabilistic collision queries between convex as well as non-convex objects. Our approach is applicable to general shapes, where one or more objects are represented using Gaussian probability distributions. We present a fast new algorithm for a pair of convex objects, and extend the approach to non-convex models using hierarchical representations. We highlight the performance of our algorithms with various convex and non-convex shapes on complex synthetic benchmarks and trajectory planning benchmarks for a 7-DOF Fetch robot arm.
Fast and Bounded Probabilistic Collision Detection in Dynamic Environments for High-DOF Trajectory Planning
Jul 16, 2016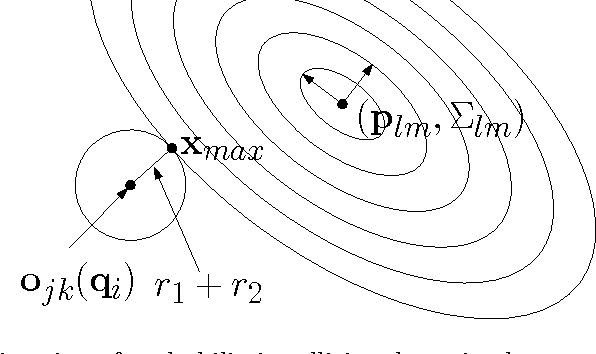
We present a novel approach to perform probabilistic collision detection between a high-DOF robot and high-DOF obstacles in dynamic, uncertain environments. In dynamic environments with a high-DOF robot and moving obstacles, our approach efficiently computes accurate collision probability between the robot and obstacles with upper error bounds. Furthermore, we describe a prediction algorithm for future obstacle position and motion that accounts for both spatial and temporal uncertainties. We present a trajectory optimization algorithm for high-DOF robots in dynamic, uncertain environments based on probabilistic collision detection. We highlight motion planning performance in challenging scenarios with robot arms operating in environments with dynamically moving human obstacles.
DoraPicker: An Autonomous Picking System for General Objects
Mar 21, 2016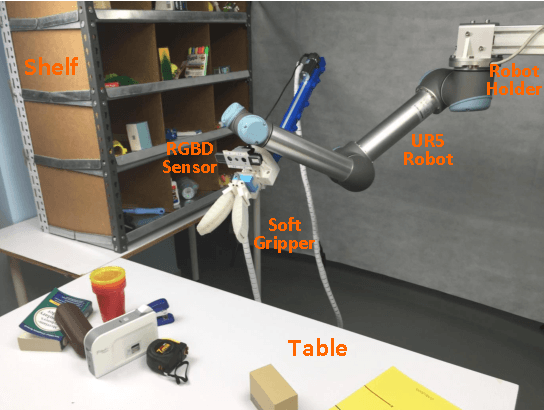

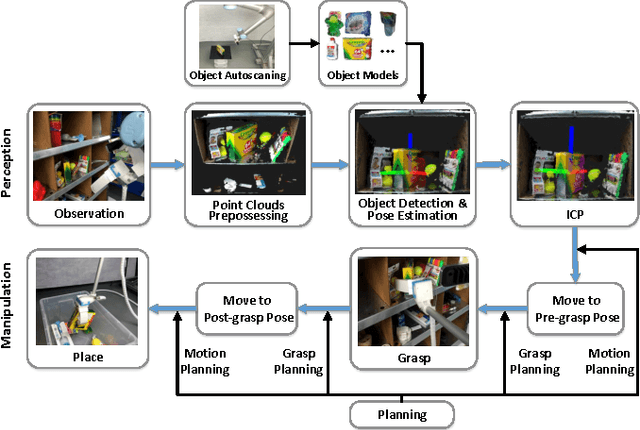
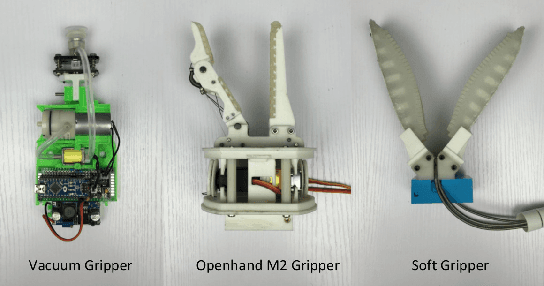
Robots that autonomously manipulate objects within warehouses have the potential to shorten the package delivery time and improve the efficiency of the e-commerce industry. In this paper, we present a robotic system that is capable of both picking and placing general objects in warehouse scenarios. Given a target object, the robot autonomously detects it from a shelf or a table and estimates its full 6D pose. With this pose information, the robot picks the object using its gripper, and then places it into a container or at a specified location. We describe our pick-and-place system in detail while highlighting our design principles for the warehouse settings, including the perception method that leverages knowledge about its workspace, three grippers designed to handle a large variety of different objects in terms of shape, weight and material, and grasp planning in cluttered scenarios. We also present extensive experiments to evaluate the performance of our picking system and demonstrate that the robot is competent to accomplish various tasks in warehouse settings, such as picking a target item from a tight space, grasping different objects from the shelf, and performing pick-and-place tasks on the table.