Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Probabilistic Collision Detection for Non-Convex Shapes
Paper and Code
Oct 12, 2016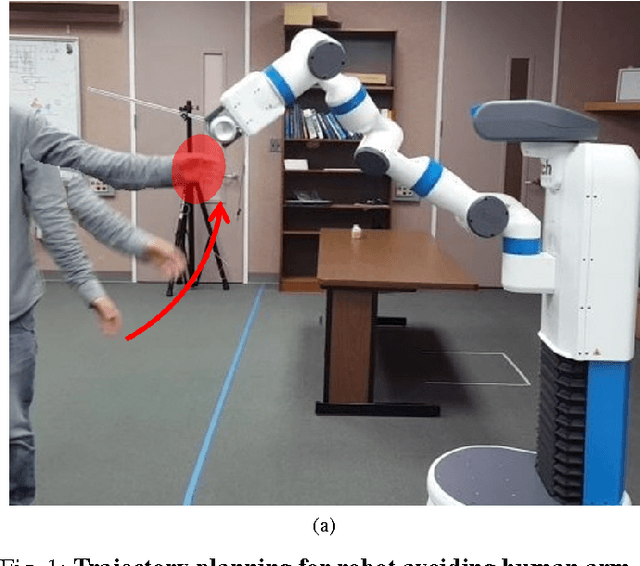
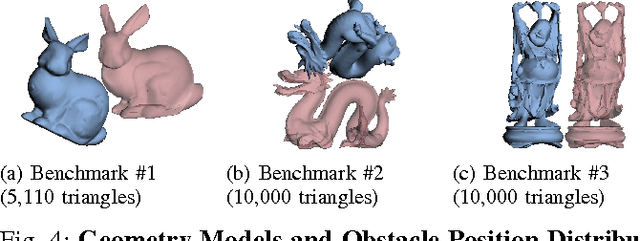
We present new algorithms to perform fast probabilistic collision queries between convex as well as non-convex objects. Our approach is applicable to general shapes, where one or more objects are represented using Gaussian probability distributions. We present a fast new algorithm for a pair of convex objects, and extend the approach to non-convex models using hierarchical representations. We highlight the performance of our algorithms with various convex and non-convex shapes on complex synthetic benchmarks and trajectory planning benchmarks for a 7-DOF Fetch robot arm.
* 9 pages, 6 figures
View paper on