 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Bounded Probabilistic Collision Detection in Dynamic Environments for High-DOF Trajectory Planning
Paper and Code
Jul 16, 2016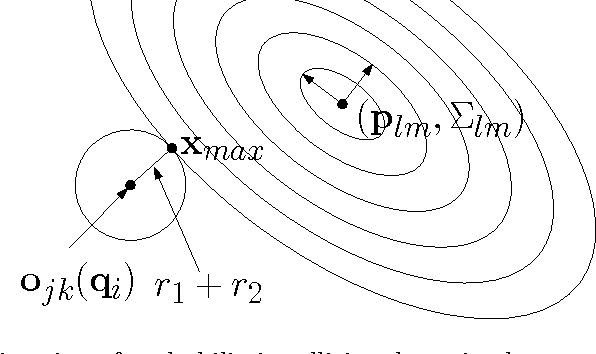
We present a novel approach to perform probabilistic collision detection between a high-DOF robot and high-DOF obstacles in dynamic, uncertain environments. In dynamic environments with a high-DOF robot and moving obstacles, our approach efficiently computes accurate collision probability between the robot and obstacles with upper error bounds. Furthermore, we describe a prediction algorithm for future obstacle position and motion that accounts for both spatial and temporal uncertainties. We present a trajectory optimization algorithm for high-DOF robots in dynamic, uncertain environments based on probabilistic collision detection. We highlight motion planning performance in challenging scenarios with robot arms operating in environments with dynamically moving human obstacles.