 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan Decentralized Stochastic Minimax Optimization Algorithms Converge Linearly for Finite-Sum Nonconvex-Nonconcave Problems?
Apr 24, 2023Decentralized minimax optimization has been actively studied in the past few years due to its application in a wide range of machine learning models. However, the current theoretical understanding of its convergence rate is far from satisfactory since existing works only focus on the nonconvex-strongly-concave problem. This motivates us to study decentralized minimax optimization algorithms for the nonconvex-nonconcave problem. To this end, we develop two novel decentralized stochastic variance-reduced gradient descent ascent algorithms for the finite-sum nonconvex-nonconcave problem that satisfies the Polyak-{\L}ojasiewicz (PL) condition. In particular, our theoretical analyses demonstrate how to conduct local updates and perform communication to achieve the linear convergence rate. To the best of our knowledge, this is the first work achieving linear convergence rates for decentralized nonconvex-nonconcave problems. Finally, we verify the performance of our algorithms on both synthetic and real-world datasets. The experimental results confirm the efficacy of our algorithms.
Deep Learning Approach Protecting Privacy in Camera-Based Critical Applications
Oct 04, 2021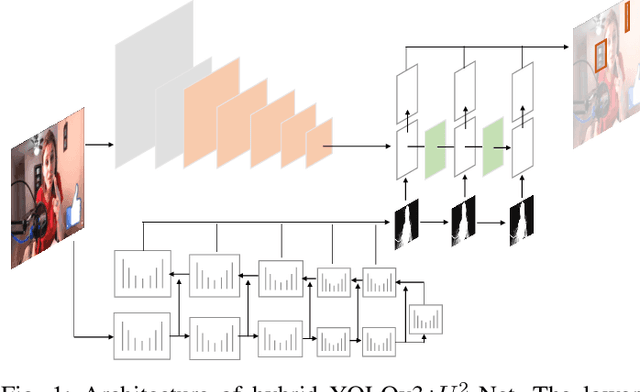
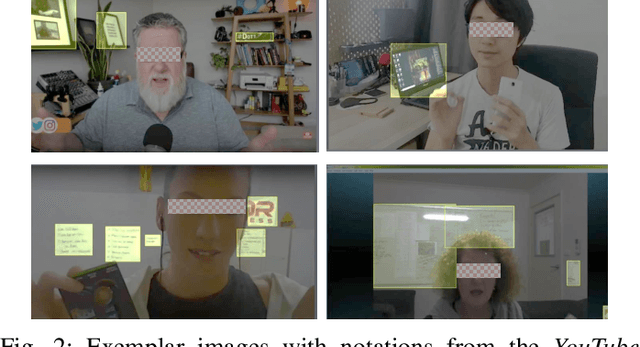
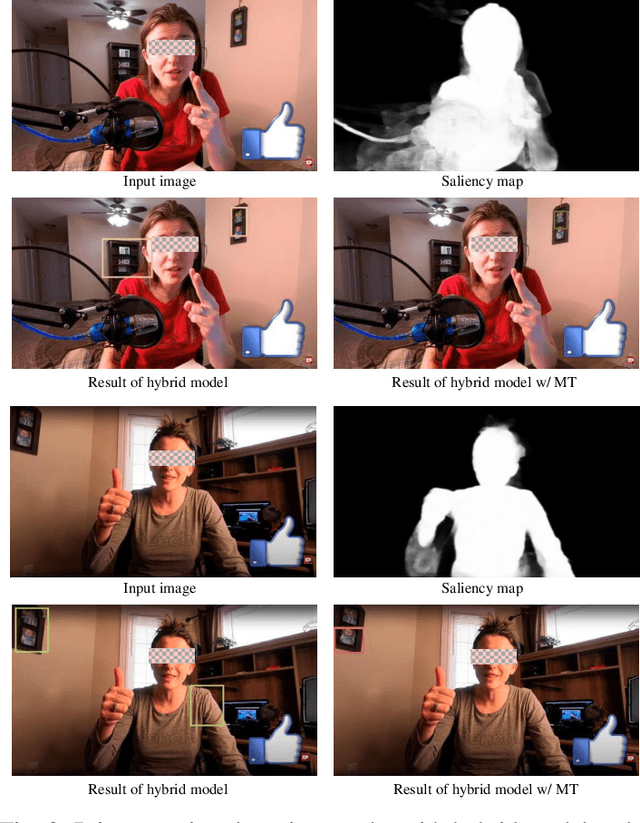
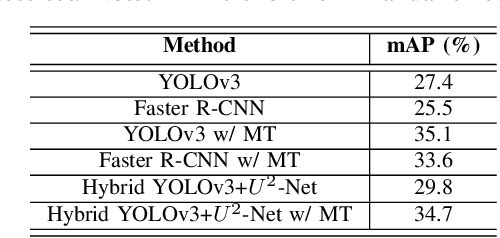
Many critical applications rely on cameras to capture video footage for analytical purposes. This has led to concerns about these cameras accidentally capturing more information than is necessary. In this paper, we propose a deep learning approach towards protecting privacy in camera-based systems. Instead of specifying specific objects (e.g. faces) are privacy sensitive, our technique distinguishes between salient (visually prominent) and non-salient objects based on the intuition that the latter is unlikely to be needed by the application.
Semantic-Aware Label Placement for Augmented Reality in Street View
Dec 15, 2019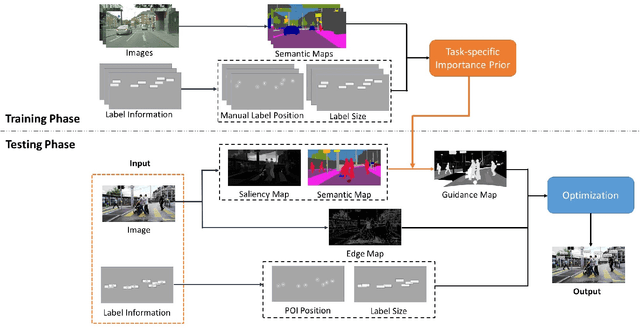

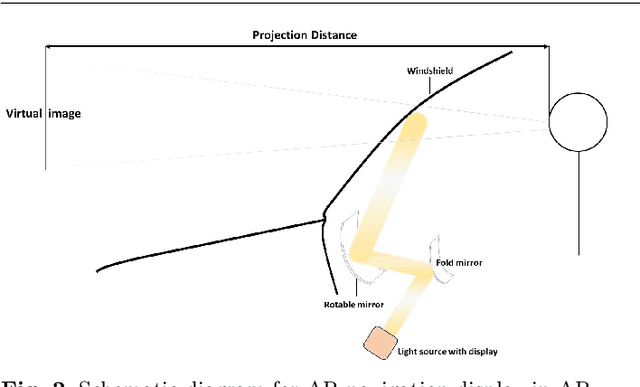
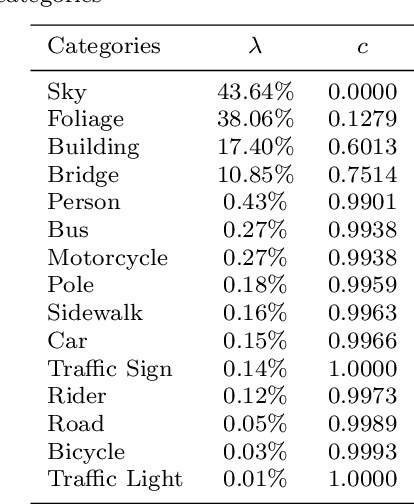
In an augmented reality (AR) application, placing labels in a manner that is clear and readable without occluding the critical information from the real-world can be a challenging problem. This paper introduces a label placement technique for AR used in street view scenarios. We propose a semantic-aware task-specific label placement method by identifying potentially important image regions through a novel feature map, which we refer to as guidance map. Given an input image, its saliency information, semantic information and the task-specific importance prior are integrated into the guidance map for our labeling task. To learn the task prior, we created a label placement dataset with the users' labeling preferences, as well as use it for evaluation. Our solution encodes the constraints for placing labels in an optimization problem to obtain the final label layout, and the labels will be placed in appropriate positions to reduce the chances of overlaying important real-world objects in street view AR scenarios. The experimental validation shows clearly the benefits of our method over previous solutions in the AR street view navigation and similar applications.