 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAED: Adaptable Error Detection for Few-shot Imitation Policy
Feb 06, 2024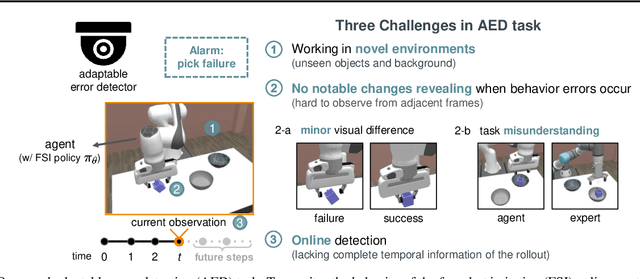
We study how to report few-shot imitation (FSI) policies' behavior errors in novel environments, a novel task named adaptable error detection (AED). The potential to cause serious damage to surrounding areas limits the application of FSI policies in real-world scenarios. Thus, a robust system is necessary to notify operators when FSI policies are inconsistent with the intent of demonstrations. We develop a cross-domain benchmark for the challenging AED task, consisting of 329 base and 158 novel environments. This task introduces three challenges, including (1) detecting behavior errors in novel environments, (2) behavior errors occurring without revealing notable changes, and (3) lacking complete temporal information of the rollout due to the necessity of online detection. To address these challenges, we propose Pattern Observer (PrObe) to parse discernible patterns in the policy feature representations of normal or error states, whose effectiveness is verified in the proposed benchmark. Through our comprehensive evaluation, PrObe consistently surpasses strong baselines and demonstrates a robust capability to identify errors arising from a wide range of FSI policies. Moreover, we conduct comprehensive ablations and experiments (error correction, demonstration quality, etc.) to validate the practicality of our proposed task and methodology.
Orbeez-SLAM: A Real-time Monocular Visual SLAM with ORB Features and NeRF-realized Mapping
Sep 27, 2022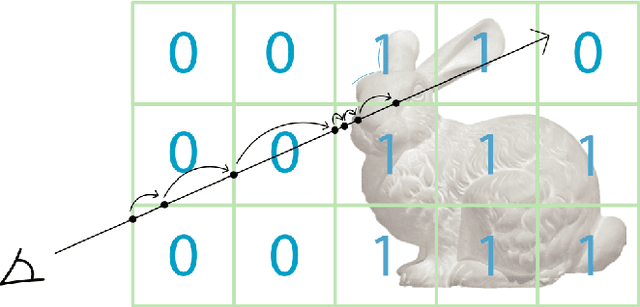
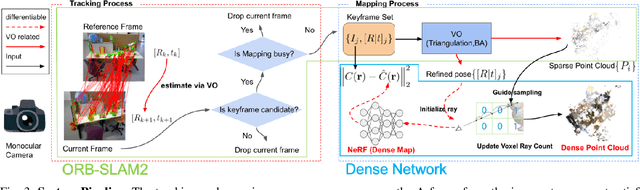
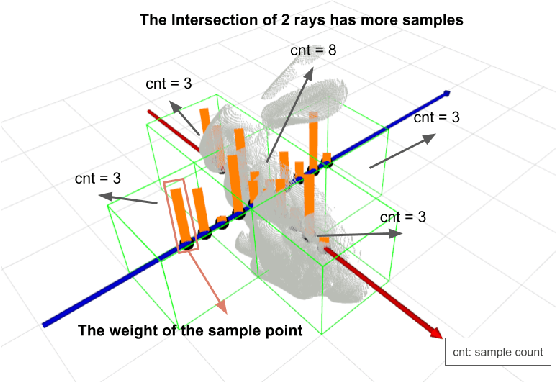
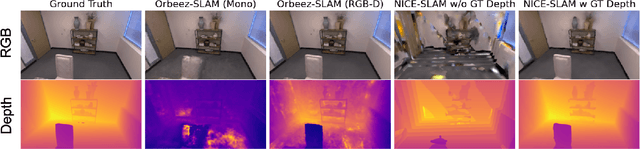
A spatial AI that can perform complex tasks through visual signals and cooperate with humans is highly anticipated. To achieve this, we need a visual SLAM that easily adapts to new scenes without pre-training and generates dense maps for downstream tasks in real-time. None of the previous learning-based and non-learning-based visual SLAMs satisfy all needs due to the intrinsic limitations of their components. In this work, we develop a visual SLAM named Orbeez-SLAM, which successfully collaborates with implicit neural representation (NeRF) and visual odometry to achieve our goals. Moreover, Orbeez-SLAM can work with the monocular camera since it only needs RGB inputs, making it widely applicable to the real world. We validate its effectiveness on various challenging benchmarks. Results show that our SLAM is up to 800x faster than the strong baseline with superior rendering outcomes.
Stage Conscious Attention Network (SCAN) : A Demonstration-Conditioned Policy for Few-Shot Imitation
Dec 04, 2021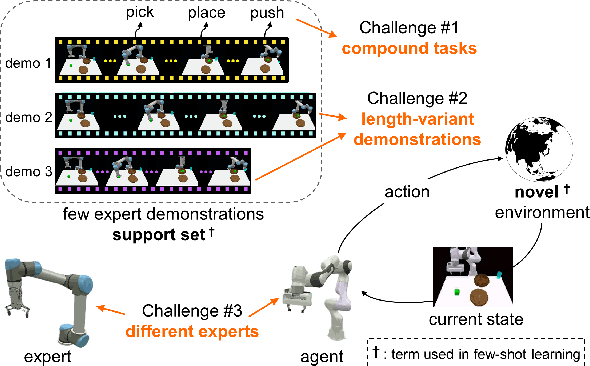
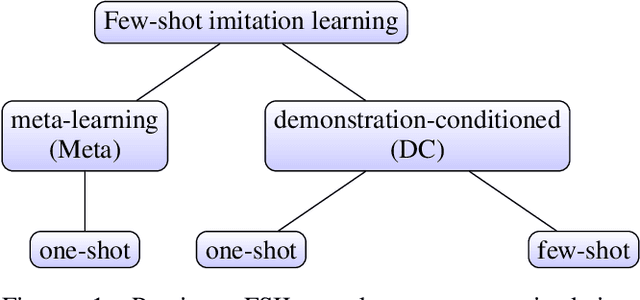

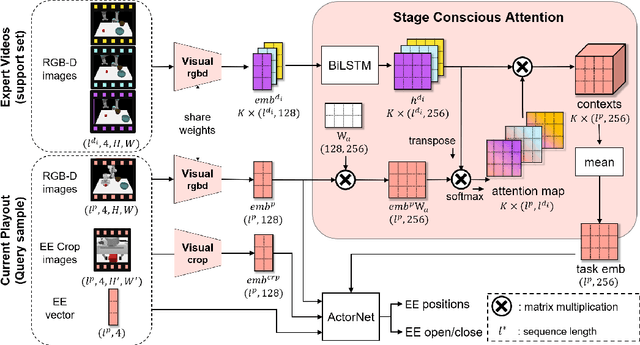
In few-shot imitation learning (FSIL), using behavioral cloning (BC) to solve unseen tasks with few expert demonstrations becomes a popular research direction. The following capabilities are essential in robotics applications: (1) Behaving in compound tasks that contain multiple stages. (2) Retrieving knowledge from few length-variant and misalignment demonstrations. (3) Learning from a different expert. No previous work can achieve these abilities at the same time. In this work, we conduct FSIL problem under the union of above settings and introduce a novel stage conscious attention network (SCAN) to retrieve knowledge from few demonstrations simultaneously. SCAN uses an attention module to identify each stage in length-variant demonstrations. Moreover, it is designed under demonstration-conditioned policy that learns the relationship between experts and agents. Experiment results show that SCAN can learn from different experts without fine-tuning and outperform baselines in complicated compound tasks with explainable visualization.