 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderstanding Agent Scaling in LLM-Based Multi-Agent Systems via Diversity
Feb 03, 2026LLM-based multi-agent systems (MAS) have emerged as a promising approach to tackle complex tasks that are difficult for individual LLMs. A natural strategy is to scale performance by increasing the number of agents; however, we find that such scaling exhibits strong diminishing returns in homogeneous settings, while introducing heterogeneity (e.g., different models, prompts, or tools) continues to yield substantial gains. This raises a fundamental question: what limits scaling, and why does diversity help? We present an information-theoretic framework showing that MAS performance is bounded by the intrinsic task uncertainty, not by agent count. We derive architecture-agnostic bounds demonstrating that improvements depend on how many effective channels the system accesses. Homogeneous agents saturate early because their outputs are strongly correlated, whereas heterogeneous agents contribute complementary evidence. We further introduce $K^*$, an effective channel count that quantifies the number of effective channels without ground-truth labels. Empirically, we show that heterogeneous configurations consistently outperform homogeneous scaling: 2 diverse agents can match or exceed the performance of 16 homogeneous agents. Our results provide principled guidelines for building efficient and robust MAS through diversity-aware design. Code and Dataset are available at the link: https://github.com/SafeRL-Lab/Agent-Scaling.
Hybrid Transfer Reinforcement Learning: Provable Sample Efficiency from Shifted-Dynamics Data
Nov 06, 2024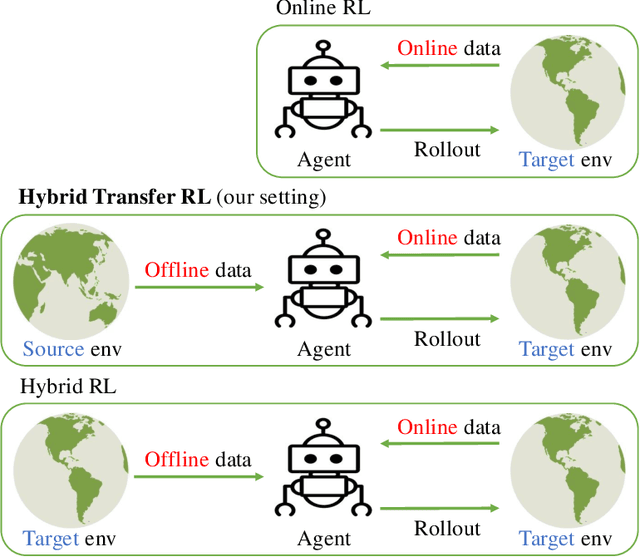
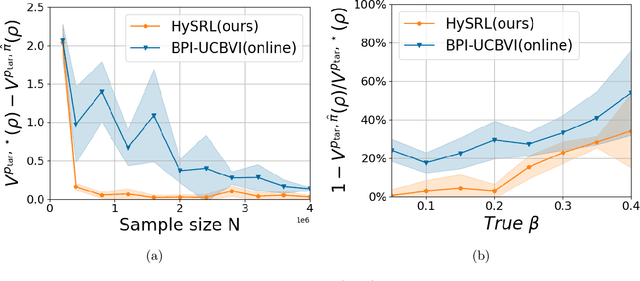
Online Reinforcement learning (RL) typically requires high-stakes online interaction data to learn a policy for a target task. This prompts interest in leveraging historical data to improve sample efficiency. The historical data may come from outdated or related source environments with different dynamics. It remains unclear how to effectively use such data in the target task to provably enhance learning and sample efficiency. To address this, we propose a hybrid transfer RL (HTRL) setting, where an agent learns in a target environment while accessing offline data from a source environment with shifted dynamics. We show that -- without information on the dynamics shift -- general shifted-dynamics data, even with subtle shifts, does not reduce sample complexity in the target environment. However, with prior information on the degree of the dynamics shift, we design HySRL, a transfer algorithm that achieves problem-dependent sample complexity and outperforms pure online RL. Finally, our experimental results demonstrate that HySRL surpasses state-of-the-art online RL baseline.