 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Coordination across Diverse Applications: A Survey
Feb 21, 2025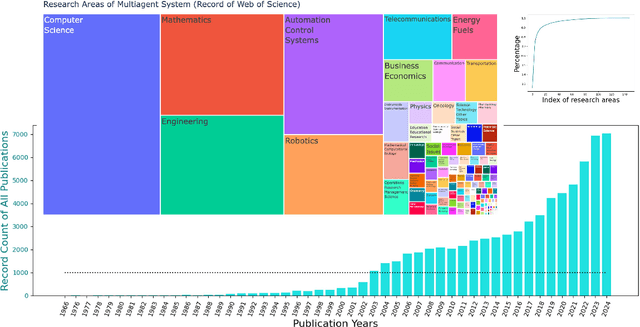
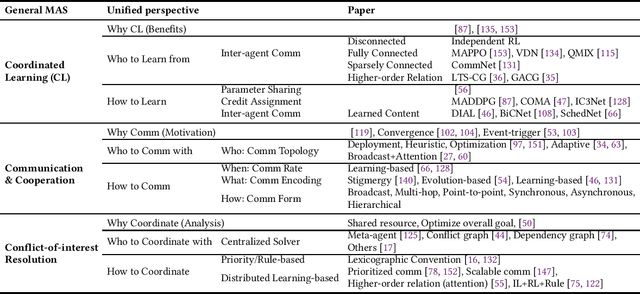
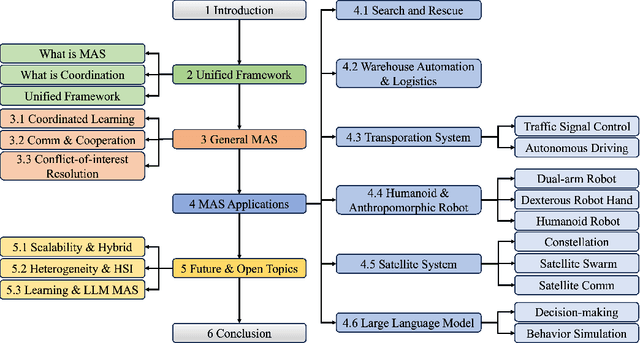
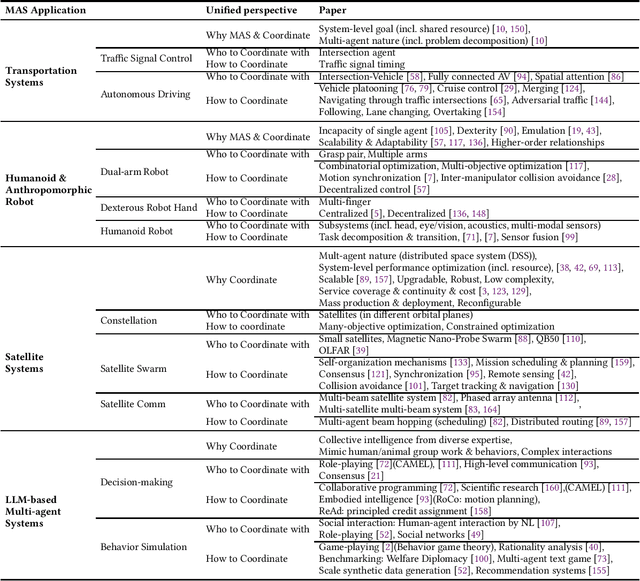
Multi-agent coordination studies the underlying mechanism enabling the trending spread of diverse multi-agent systems (MAS) and has received increasing attention, driven by the expansion of emerging applications and rapid AI advances. This survey outlines the current state of coordination research across applications through a unified understanding that answers four fundamental coordination questions: (1) what is coordination; (2) why coordination; (3) who to coordinate with; and (4) how to coordinate. Our purpose is to explore existing ideas and expertise in coordination and their connections across diverse applications, while identifying and highlighting emerging and promising research directions. First, general coordination problems that are essential to varied applications are identified and analyzed. Second, a number of MAS applications are surveyed, ranging from widely studied domains, e.g., search and rescue, warehouse automation and logistics, and transportation systems, to emerging fields including humanoid and anthropomorphic robots, satellite systems, and large language models (LLMs). Finally, open challenges about the scalability, heterogeneity, and learning mechanisms of MAS are analyzed and discussed. In particular, we identify the hybridization of hierarchical and decentralized coordination, human-MAS coordination, and LLM-based MAS as promising future directions.
Toward multi-target self-organizing pursuit in a partially observable Markov game
Jun 24, 2022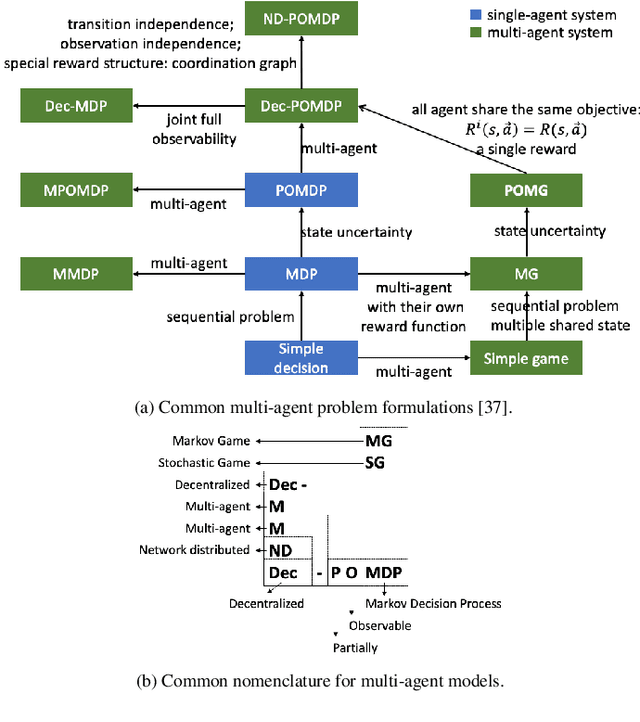
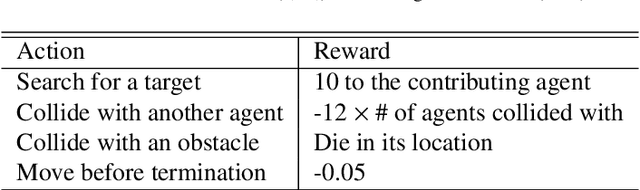
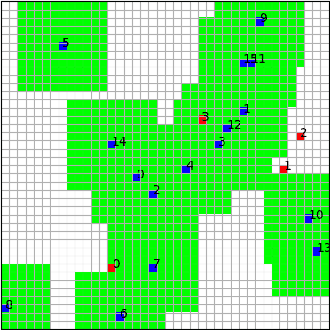

The multiple-target self-organizing pursuit (SOP) problem has wide applications and has been considered a challenging self-organization game for distributed systems, in which intelligent agents cooperatively pursue multiple dynamic targets with partial observations. This work proposes a framework for decentralized multi-agent systems to improve intelligent agents' search and pursuit capabilities. We model a self-organizing system as a partially observable Markov game (POMG) with the features of decentralization, partial observation, and noncommunication. The proposed distributed algorithm: fuzzy self-organizing cooperative coevolution (FSC2) is then leveraged to resolve the three challenges in multi-target SOP: distributed self-organizing search (SOS), distributed task allocation, and distributed single-target pursuit. FSC2 includes a coordinated multi-agent deep reinforcement learning method that enables homogeneous agents to learn natural SOS patterns. Additionally, we propose a fuzzy-based distributed task allocation method, which locally decomposes multi-target SOP into several single-target pursuit problems. The cooperative coevolution principle is employed to coordinate distributed pursuers for each single-target pursuit problem. Therefore, the uncertainties of inherent partial observation and distributed decision-making in the POMG can be alleviated. The experimental results demonstrate that distributed noncommunicating multi-agent coordination with partial observations in all three subtasks are effective, and 2048 FSC2 agents can perform efficient multi-target SOP with an almost 100% capture rate.
Cooperative coevolution of real predator robots and virtual robots in the pursuit domain
Jan 23, 2019



The pursuit domain, or predator-prey problem is a standard testbed for the study of coordination techniques. In spite that its problem setup is apparently simple, it is challenging for the research of the emerged swarm intelligence. This paper presents a particle swarm optimization (PSO) based cooperative coevolutionary algorithm for the predator robots, called CCPSO-R, where real and virtual robots coexist for the first time in an evolutionary algorithm (EA). Virtual robots sample and explore the vicinity of the corresponding real robot and act as their action spaces, while the real robots consist of the real predators swarm who actually pursue the prey robot without fixed behavior rules under the immediate guidance of the fitness function, which is designed in a modular manner with very limited domain knowledges. In addition, kinematic limits and collision avoidance considerations are integrated into the update rules of robots. Experiments are conducted on a scalable predator robots swarm with 4 types of preys, the statistical results of which show the reliability, generality, and scalability of the proposed CCPSO-R. Finally, the codes of this paper are public availabe at: https://github.com/LijunSun90/pursuitCCPSO_R.