 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePROPA: Toward Process-level Optimization in Visual Reasoning via Reinforcement Learning
Nov 13, 2025Despite significant progress, Vision-Language Models (VLMs) still struggle with complex visual reasoning, where multi-step dependencies cause early errors to cascade through the reasoning chain. Existing post-training paradigms are limited: Supervised Fine-Tuning (SFT) relies on costly step-level annotations, while Reinforcement Learning with Verifiable Rewards (RLVR) methods like GRPO provide only sparse, outcome-level feedback, hindering stable optimization. We introduce PROPA (Process-level Reasoning Optimization with interleaved Policy Alignment), a novel framework that integrates Monte Carlo Tree Search (MCTS) with GRPO to generate dense, process-level rewards and optimize reasoning at each intermediate step without human annotations. To overcome the cold-start problem, PROPA interleaves GRPO updates with SFT, enabling the model to learn from both successful and failed reasoning trajectories. A Process Reward Model (PRM) is further trained to guide inference-time search, aligning the test-time search with the training signal. Across seven benchmarks and four VLM backbones, PROPA consistently outperforms both SFT- and RLVR-based baselines. It achieves up to 17.0% gains on in-domain tasks and 21.0% gains on out-of-domain tasks compared to existing state-of-the-art, establishing a strong reasoning and generalization capability for visual reasoning tasks. The code isavailable at: https://github.com/YanbeiJiang/PROPA.
Beyond Perception: Evaluating Abstract Visual Reasoning through Multi-Stage Task
May 28, 2025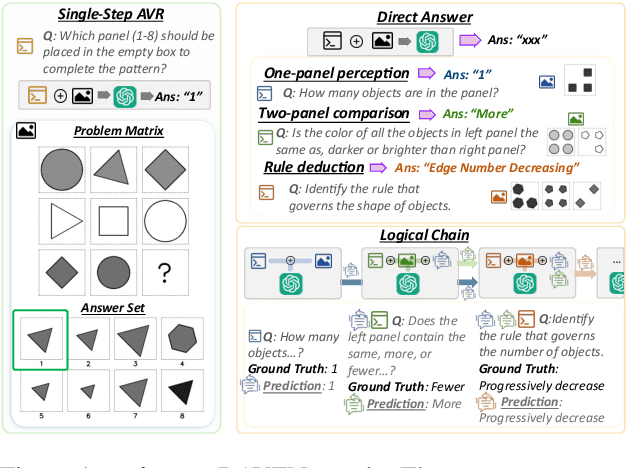
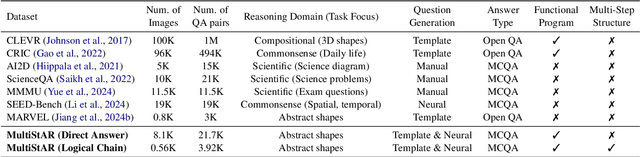
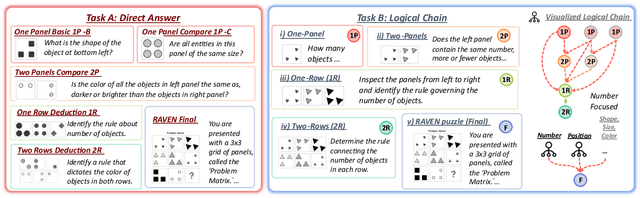
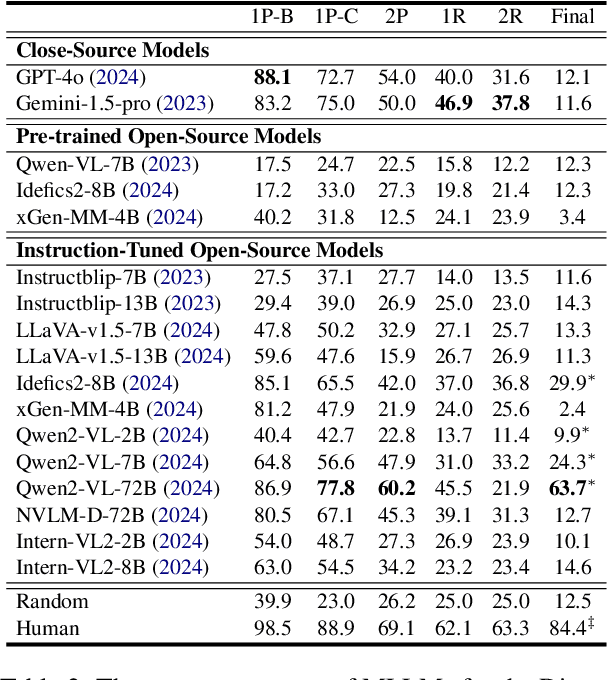
Current Multimodal Large Language Models (MLLMs) excel in general visual reasoning but remain underexplored in Abstract Visual Reasoning (AVR), which demands higher-order reasoning to identify abstract rules beyond simple perception. Existing AVR benchmarks focus on single-step reasoning, emphasizing the end result but neglecting the multi-stage nature of reasoning process. Past studies found MLLMs struggle with these benchmarks, but it doesn't explain how they fail. To address this gap, we introduce MultiStAR, a Multi-Stage AVR benchmark, based on RAVEN, designed to assess reasoning across varying levels of complexity. Additionally, existing metrics like accuracy only focus on the final outcomes while do not account for the correctness of intermediate steps. Therefore, we propose a novel metric, MSEval, which considers the correctness of intermediate steps in addition to the final outcomes. We conduct comprehensive experiments on MultiStAR using 17 representative close-source and open-source MLLMs. The results reveal that while existing MLLMs perform adequately on basic perception tasks, they continue to face challenges in more complex rule detection stages.
From Reasoning to Generalization: Knowledge-Augmented LLMs for ARC Benchmark
May 23, 2025Recent reasoning-oriented LLMs have demonstrated strong performance on challenging tasks such as mathematics and science examinations. However, core cognitive faculties of human intelligence, such as abstract reasoning and generalization, remain underexplored. To address this, we evaluate recent reasoning-oriented LLMs on the Abstraction and Reasoning Corpus (ARC) benchmark, which explicitly demands both faculties. We formulate ARC as a program synthesis task and propose nine candidate solvers. Experimental results show that repeated-sampling planning-aided code generation (RSPC) achieves the highest test accuracy and demonstrates consistent generalization across most LLMs. To further improve performance, we introduce an ARC solver, Knowledge Augmentation for Abstract Reasoning (KAAR), which encodes core knowledge priors within an ontology that classifies priors into three hierarchical levels based on their dependencies. KAAR progressively expands LLM reasoning capacity by gradually augmenting priors at each level, and invokes RSPC to generate candidate solutions after each augmentation stage. This stage-wise reasoning reduces interference from irrelevant priors and improves LLM performance. Empirical results show that KAAR maintains strong generalization and consistently outperforms non-augmented RSPC across all evaluated LLMs, achieving around 5% absolute gains and up to 64.52% relative improvement. Despite these achievements, ARC remains a challenging benchmark for reasoning-oriented LLMs, highlighting future avenues of progress in LLMs.
State-Based Disassembly Planning
Jan 09, 2025



It has been shown recently that physics-based simulation significantly enhances the disassembly capabilities of real-world assemblies with diverse 3D shapes and stringent motion constraints. However, the efficiency suffers when tackling intricate disassembly tasks that require numerous simulations and increased simulation time. In this work, we propose a State-Based Disassembly Planning (SBDP) approach, prioritizing physics-based simulation with translational motion over rotational motion to facilitate autonomy, reducing dependency on human input, while storing intermediate motion states to improve search scalability. We introduce two novel evaluation functions derived from new Directional Blocking Graphs (DBGs) enriched with state information to scale up the search. Our experiments show that SBDP with new evaluation functions and DBGs constraints outperforms the state-of-the-art in disassembly planning in terms of success rate and computational efficiency over benchmark datasets consisting of thousands of physically valid industrial assemblies.
Planning-Driven Programming: A Large Language Model Programming Workflow
Nov 21, 2024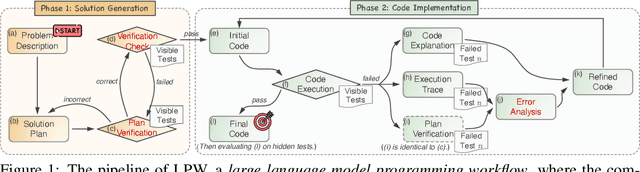
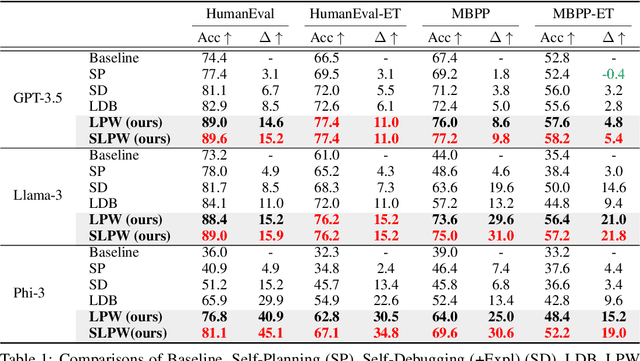
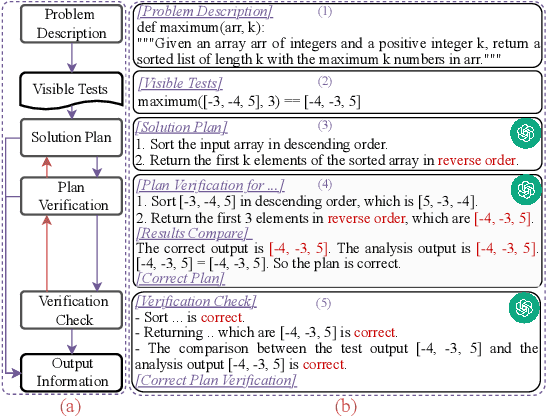

The strong performance of large language models (LLMs) on natural language processing tasks raises extensive discussion on their application to code generation. Recent work suggests multiple sampling approaches to improve initial code generation accuracy or program repair approaches to refine the code. However, these methods suffer from LLMs' inefficiencies and limited reasoning capacity. In this work, we propose an LLM programming workflow (LPW) designed to improve both initial code generation and subsequent refinements within a structured two-phase workflow. Specifically, in the solution generation phase, the LLM first outlines a solution plan that decomposes the problem into manageable sub-problems and then verifies the generated solution plan through visible test cases. Subsequently, in the code implementation phase, the LLM initially drafts a code according to the solution plan and its verification. If the generated code fails the visible tests, the plan verification serves as the intended natural language solution to inform the refinement process for correcting bugs. We further introduce SLPW, a sampling variant of LPW, which initially generates multiple solution plans and plan verifications, produces a program for each plan and its verification, and refines each program as necessary until one successfully passes the visible tests. Compared to the state-of-the-art methods across various existing LLMs, our experimental results show that LPW significantly improves the Pass@1 accuracy by up to 16.4% on well-established text-to-code generation benchmarks, especially with a notable improvement of around 10% on challenging benchmarks. Additionally, SLPW demonstrates up to a 5.6% improvement over LPW and sets new state-of-the-art Pass@1 accuracy on various benchmarks, e.g., 98.2% on HumanEval, 84.8% on MBPP, 64.0% on APPS, and 35.3% on CodeContest, using GPT-4o as the backbone.
Generalized Planning for the Abstraction and Reasoning Corpus
Jan 15, 2024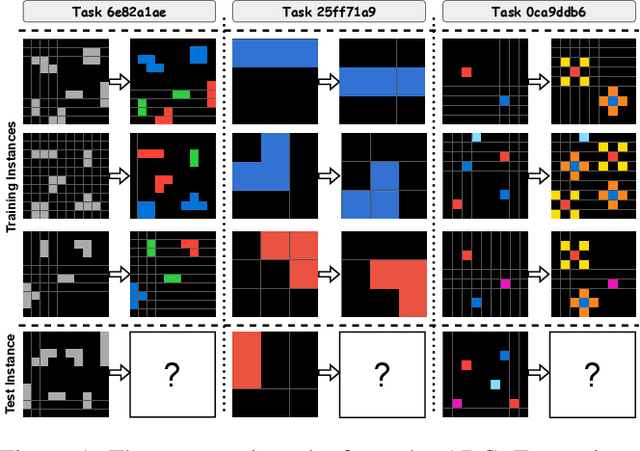
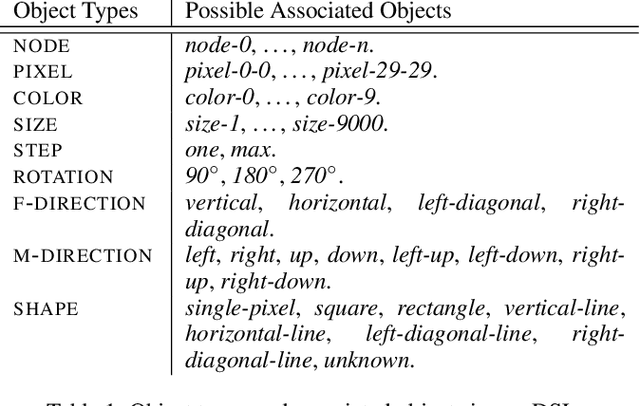
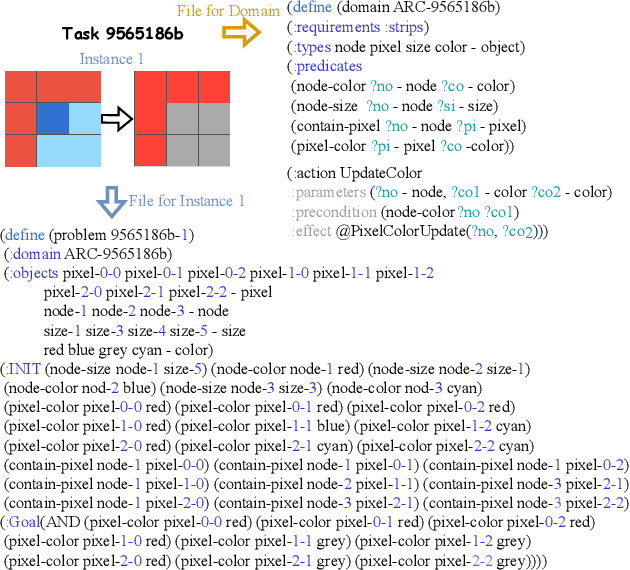
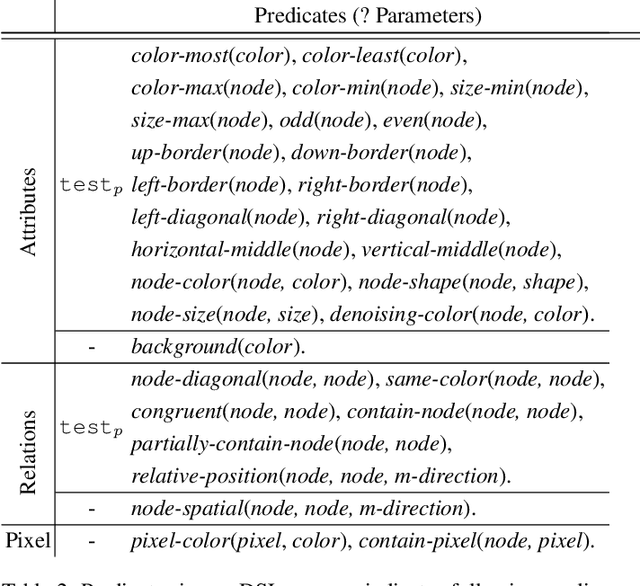
The Abstraction and Reasoning Corpus (ARC) is a general artificial intelligence benchmark that poses difficulties for pure machine learning methods due to its requirement for fluid intelligence with a focus on reasoning and abstraction. In this work, we introduce an ARC solver, Generalized Planning for Abstract Reasoning (GPAR). It casts an ARC problem as a generalized planning (GP) problem, where a solution is formalized as a planning program with pointers. We express each ARC problem using the standard Planning Domain Definition Language (PDDL) coupled with external functions representing object-centric abstractions. We show how to scale up GP solvers via domain knowledge specific to ARC in the form of restrictions over the actions model, predicates, arguments and valid structure of planning programs. Our experiments demonstrate that GPAR outperforms the state-of-the-art solvers on the object-centric tasks of the ARC, showing the effectiveness of GP and the expressiveness of PDDL to model ARC problems. The challenges provided by the ARC benchmark motivate research to advance existing GP solvers and understand new relations with other planning computational models. Code is available at github.com/you68681/GPAR.
The GUA-Speech System Description for CNVSRC Challenge 2023
Dec 12, 2023
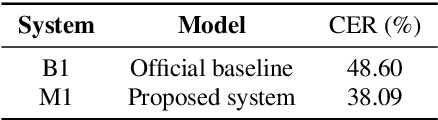
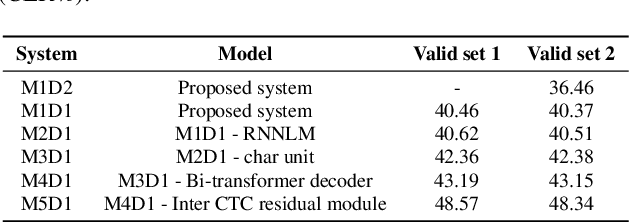
This study describes our system for Task 1 Single-speaker Visual Speech Recognition (VSR) fixed track in the Chinese Continuous Visual Speech Recognition Challenge (CNVSRC) 2023. Specifically, we use intermediate connectionist temporal classification (Inter CTC) residual modules to relax the conditional independence assumption of CTC in our model. Then we use a bi-transformer decoder to enable the model to capture both past and future contextual information. In addition, we use Chinese characters as the modeling units to improve the recognition accuracy of our model. Finally, we use a recurrent neural network language model (RNNLM) for shallow fusion in the inference stage. Experiments show that our system achieves a character error rate (CER) of 38.09% on the Eval set which reaches a relative CER reduction of 21.63% over the official baseline, and obtains a second place in the challenge.
Novelty and Lifted Helpful Actions in Generalized Planning
Jul 03, 2023It has been shown recently that successful techniques in classical planning, such as goal-oriented heuristics and landmarks, can improve the ability to compute planning programs for generalized planning (GP) problems. In this work, we introduce the notion of action novelty rank, which computes novelty with respect to a planning program, and propose novelty-based generalized planning solvers, which prune a newly generated planning program if its most frequent action repetition is greater than a given bound $v$, implemented by novelty-based best-first search BFS($v$) and its progressive variant PGP($v$). Besides, we introduce lifted helpful actions in GP derived from action schemes, and propose new evaluation functions and structural program restrictions to scale up the search. Our experiments show that the new algorithms BFS($v$) and PGP($v$) outperform the state-of-the-art in GP over the standard generalized planning benchmarks. Practical findings on the above-mentioned methods in generalized planning are briefly discussed.