 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Robot Dialogue Annotation for Multi-Modal Common Ground
Nov 19, 2024In this paper, we describe the development of symbolic representations annotated on human-robot dialogue data to make dimensions of meaning accessible to autonomous systems participating in collaborative, natural language dialogue, and to enable common ground with human partners. A particular challenge for establishing common ground arises in remote dialogue (occurring in disaster relief or search-and-rescue tasks), where a human and robot are engaged in a joint navigation and exploration task of an unfamiliar environment, but where the robot cannot immediately share high quality visual information due to limited communication constraints. Engaging in a dialogue provides an effective way to communicate, while on-demand or lower-quality visual information can be supplemented for establishing common ground. Within this paradigm, we capture propositional semantics and the illocutionary force of a single utterance within the dialogue through our Dialogue-AMR annotation, an augmentation of Abstract Meaning Representation. We then capture patterns in how different utterances within and across speaker floors relate to one another in our development of a multi-floor Dialogue Structure annotation schema. Finally, we begin to annotate and analyze the ways in which the visual modalities provide contextual information to the dialogue for overcoming disparities in the collaborators' understanding of the environment. We conclude by discussing the use-cases, architectures, and systems we have implemented from our annotations that enable physical robots to autonomously engage with humans in bi-directional dialogue and navigation.
* 52 pages, 14 figures
SCOUT: A Situated and Multi-Modal Human-Robot Dialogue Corpus
Nov 19, 2024



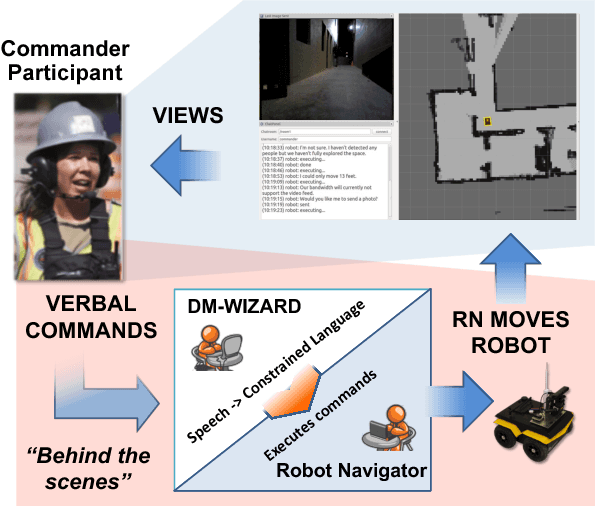
We introduce the Situated Corpus Of Understanding Transactions (SCOUT), a multi-modal collection of human-robot dialogue in the task domain of collaborative exploration. The corpus was constructed from multiple Wizard-of-Oz experiments where human participants gave verbal instructions to a remotely-located robot to move and gather information about its surroundings. SCOUT contains 89,056 utterances and 310,095 words from 278 dialogues averaging 320 utterances per dialogue. The dialogues are aligned with the multi-modal data streams available during the experiments: 5,785 images and 30 maps. The corpus has been annotated with Abstract Meaning Representation and Dialogue-AMR to identify the speaker's intent and meaning within an utterance, and with Transactional Units and Relations to track relationships between utterances to reveal patterns of the Dialogue Structure. We describe how the corpus and its annotations have been used to develop autonomous human-robot systems and enable research in open questions of how humans speak to robots. We release this corpus to accelerate progress in autonomous, situated, human-robot dialogue, especially in the context of navigation tasks where details about the environment need to be discovered.
* 14 pages, 7 figures
Balancing Efficiency and Coverage in Human-Robot Dialogue Collection
Oct 07, 2018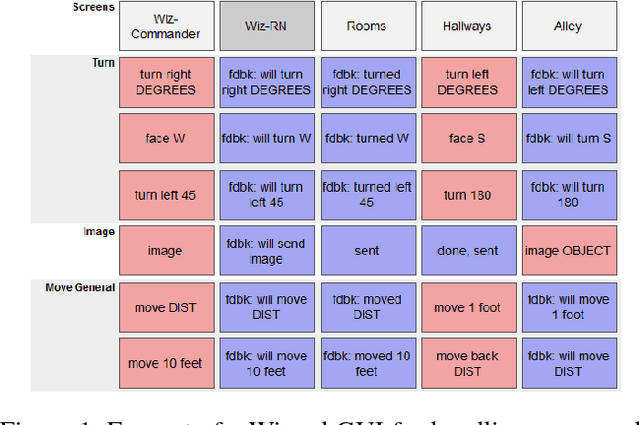
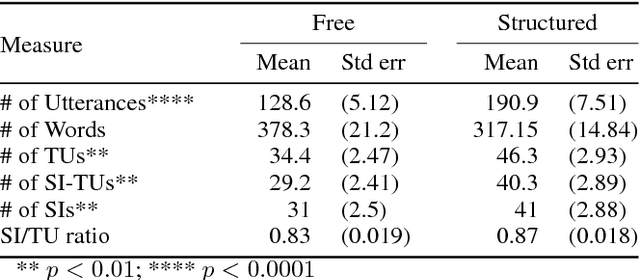
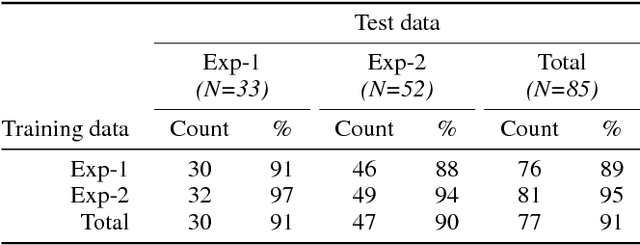
We describe a multi-phased Wizard-of-Oz approach to collecting human-robot dialogue in a collaborative search and navigation task. The data is being used to train an initial automated robot dialogue system to support collaborative exploration tasks. In the first phase, a wizard freely typed robot utterances to human participants. For the second phase, this data was used to design a GUI that includes buttons for the most common communications, and templates for communications with varying parameters. Comparison of the data gathered in these phases show that the GUI enabled a faster pace of dialogue while still maintaining high coverage of suitable responses, enabling more efficient targeted data collection, and improvements in natural language understanding using GUI-collected data. As a promising first step towards interactive learning, this work shows that our approach enables the collection of useful training data for navigation-based HRI tasks.
Consequences and Factors of Stylistic Differences in Human-Robot Dialogue
Jul 21, 2018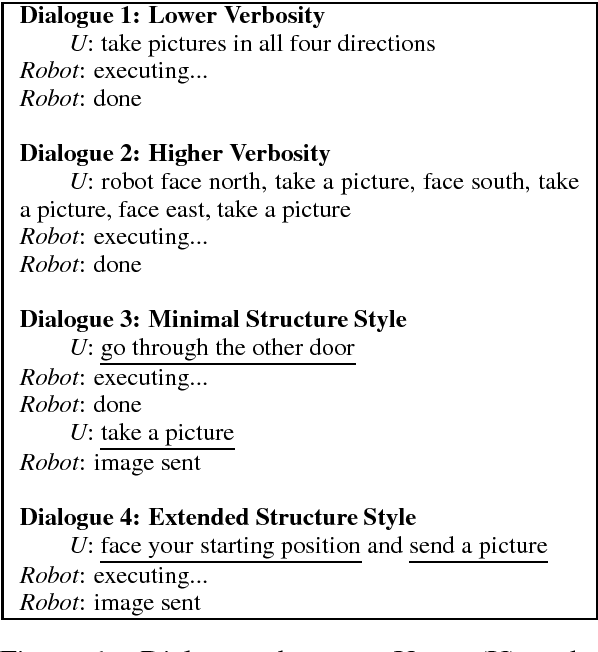
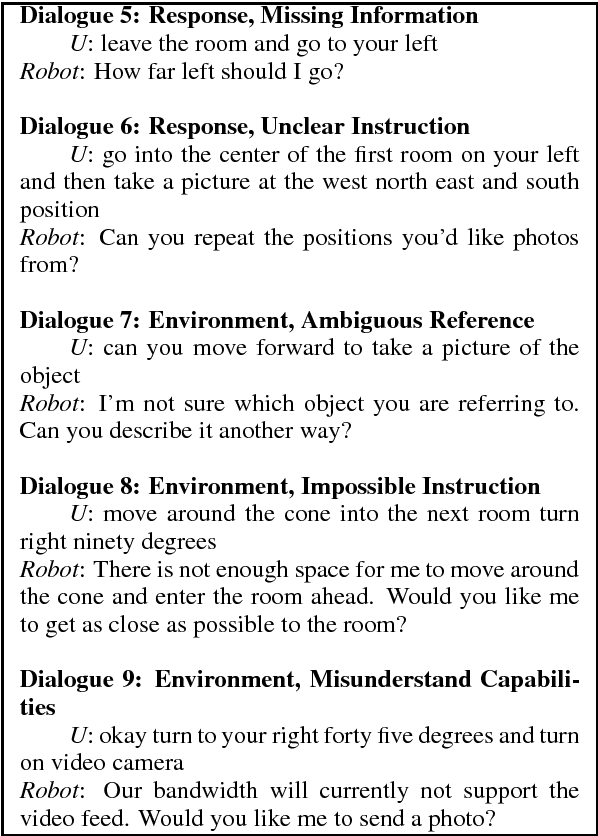
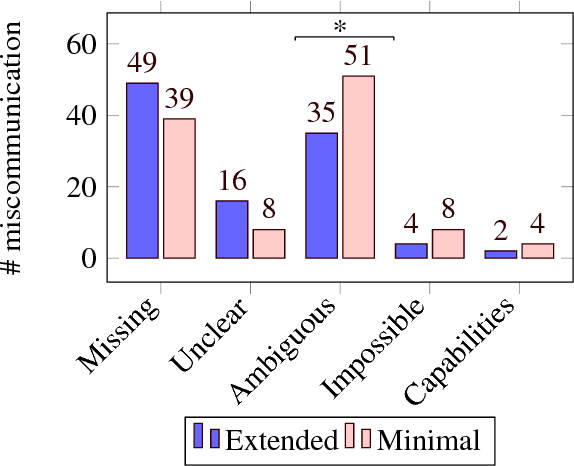
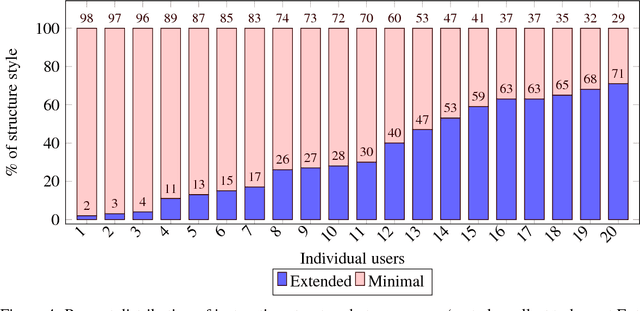
This paper identifies stylistic differences in instruction-giving observed in a corpus of human-robot dialogue. Differences in verbosity and structure (i.e., single-intent vs. multi-intent instructions) arose naturally without restrictions or prior guidance on how users should speak with the robot. Different styles were found to produce different rates of miscommunication, and correlations were found between style differences and individual user variation, trust, and interaction experience with the robot. Understanding potential consequences and factors that influence style can inform design of dialogue systems that are robust to natural variation from human users.
Laying Down the Yellow Brick Road: Development of a Wizard-of-Oz Interface for Collecting Human-Robot Dialogue
Oct 17, 2017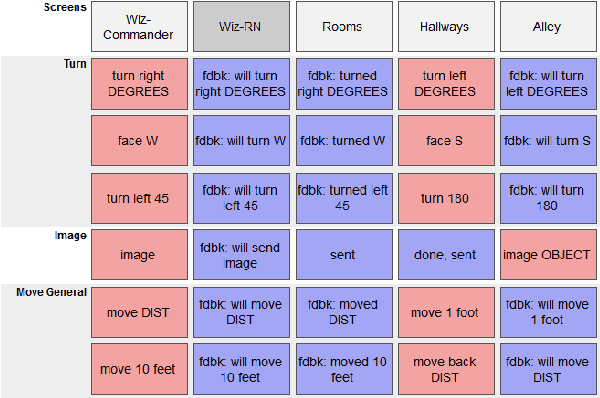
We describe the adaptation and refinement of a graphical user interface designed to facilitate a Wizard-of-Oz (WoZ) approach to collecting human-robot dialogue data. The data collected will be used to develop a dialogue system for robot navigation. Building on an interface previously used in the development of dialogue systems for virtual agents and video playback, we add templates with open parameters which allow the wizard to quickly produce a wide variety of utterances. Our research demonstrates that this approach to data collection is viable as an intermediate step in developing a dialogue system for physical robots in remote locations from their users - a domain in which the human and robot need to regularly verify and update a shared understanding of the physical environment. We show that our WoZ interface and the fixed set of utterances and templates therein provide for a natural pace of dialogue with good coverage of the navigation domain.