 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeARCADE: Scalable Demonstration Collection and Generation via Augmented Reality for Imitation Learning
Oct 21, 2024



Robot Imitation Learning (IL) is a crucial technique in robot learning, where agents learn by mimicking human demonstrations. However, IL encounters scalability challenges stemming from both non-user-friendly demonstration collection methods and the extensive time required to amass a sufficient number of demonstrations for effective training. In response, we introduce the Augmented Reality for Collection and generAtion of DEmonstrations (ARCADE) framework, designed to scale up demonstration collection for robot manipulation tasks. Our framework combines two key capabilities: 1) it leverages AR to make demonstration collection as simple as users performing daily tasks using their hands, and 2) it enables the automatic generation of additional synthetic demonstrations from a single human-derived demonstration, significantly reducing user effort and time. We assess ARCADE's performance on a real Fetch robot across three robotics tasks: 3-Waypoints-Reach, Push, and Pick-And-Place. Using our framework, we were able to rapidly train a policy using vanilla Behavioral Cloning (BC), a classic IL algorithm, which excelled across these three tasks. We also deploy ARCADE on a real household task, Pouring-Water, achieving an 80% success rate.
Augmented Reality Demonstrations for Scalable Robot Imitation Learning
Mar 20, 2024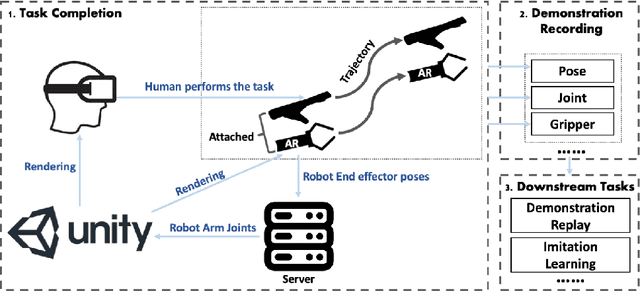

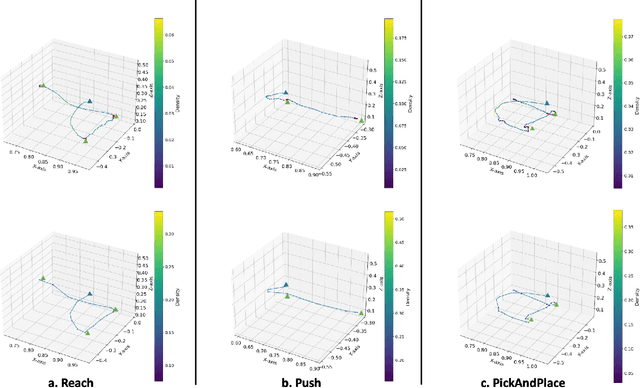

Robot Imitation Learning (IL) is a widely used method for training robots to perform manipulation tasks that involve mimicking human demonstrations to acquire skills. However, its practicality has been limited due to its requirement that users be trained in operating real robot arms to provide demonstrations. This paper presents an innovative solution: an Augmented Reality (AR)-assisted framework for demonstration collection, empowering non-roboticist users to produce demonstrations for robot IL using devices like the HoloLens 2. Our framework facilitates scalable and diverse demonstration collection for real-world tasks. We validate our approach with experiments on three classical robotics tasks: reach, push, and pick-and-place. The real robot performs each task successfully while replaying demonstrations collected via AR.
Actor-Action Video Classification CSC 249/449 Spring 2020 Challenge Report
Aug 18, 2020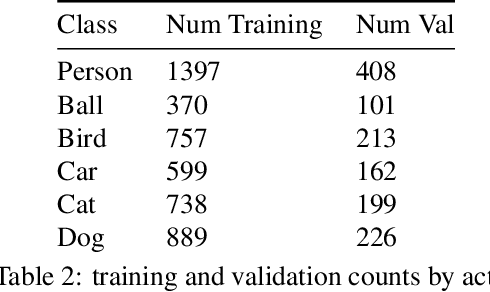
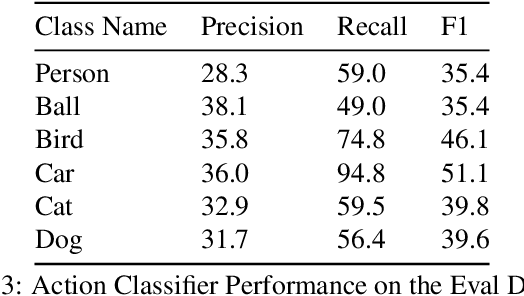
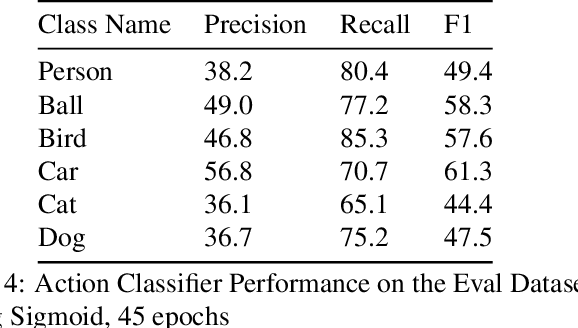
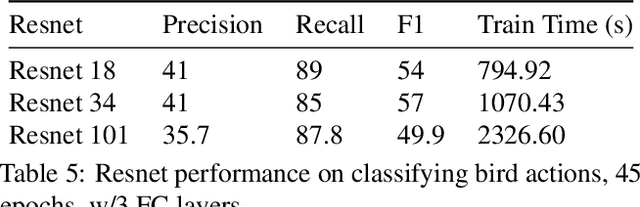
This technical report summarizes submissions and compiles from Actor-Action video classification challenge held as a final project in CSC 249/449 Machine Vision course (Spring 2020) at University of Rochester