 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvent-based Vision: A Survey
Apr 17, 2019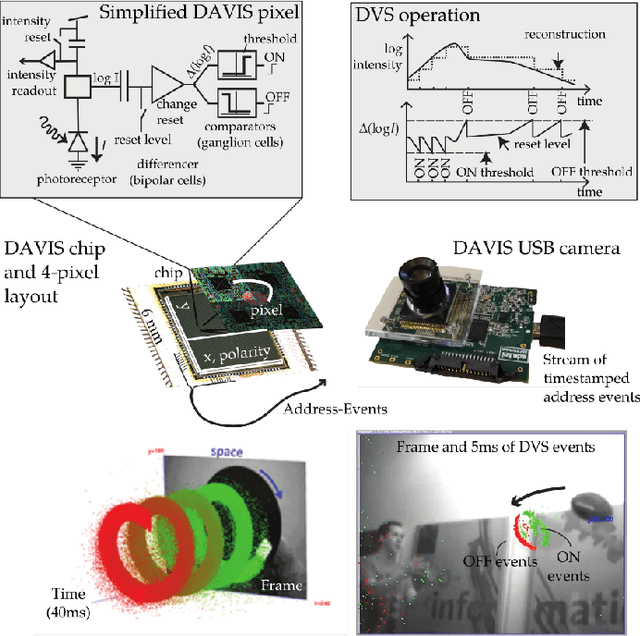
Event cameras are bio-inspired sensors that work radically different from traditional cameras. Instead of capturing images at a fixed rate, they measure per-pixel brightness changes asynchronously. This results in a stream of events, which encode the time, location and sign of the brightness changes. Event cameras posses outstanding properties compared to traditional cameras: very high dynamic range (140 dB vs. 60 dB), high temporal resolution (in the order of microseconds), low power consumption, and do not suffer from motion blur. Hence, event cameras have a large potential for robotics and computer vision in challenging scenarios for traditional cameras, such as high speed and high dynamic range. However, novel methods are required to process the unconventional output of these sensors in order to unlock their potential. This paper provides a comprehensive overview of the emerging field of event-based vision, with a focus on the applications and the algorithms developed to unlock the outstanding properties of event cameras. We present event cameras from their working principle, the actual sensors that are available and the tasks that they have been used for, from low-level vision (feature detection and tracking, optic flow, etc.) to high-level vision (reconstruction, segmentation, recognition). We also discuss the techniques developed to process events, including learning-based techniques, as well as specialized processors for these novel sensors, such as spiking neural networks. Additionally, we highlight the challenges that remain to be tackled and the opportunities that lie ahead in the search for a more efficient, bio-inspired way for machines to perceive and interact with the world.
Convolutional Networks for Fast, Energy-Efficient Neuromorphic Computing
May 24, 2016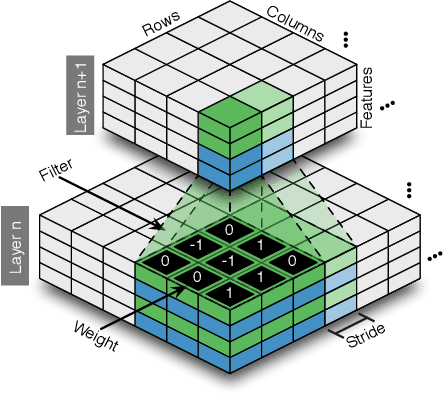
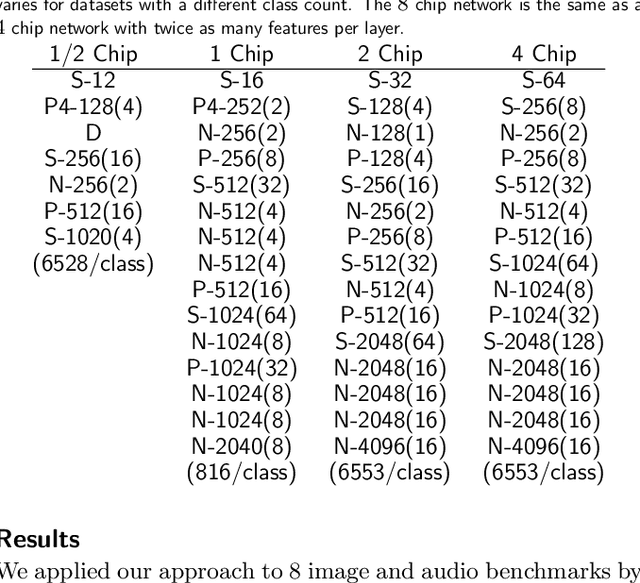
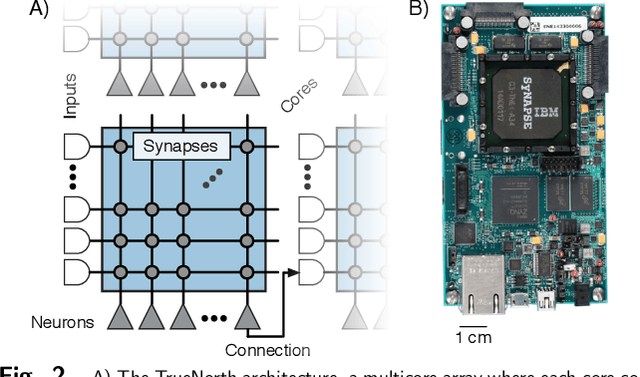
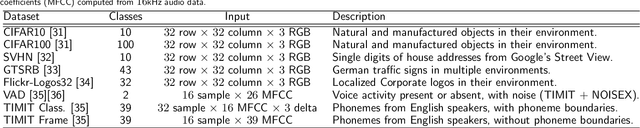
Deep networks are now able to achieve human-level performance on a broad spectrum of recognition tasks. Independently, neuromorphic computing has now demonstrated unprecedented energy-efficiency through a new chip architecture based on spiking neurons, low precision synapses, and a scalable communication network. Here, we demonstrate that neuromorphic computing, despite its novel architectural primitives, can implement deep convolution networks that i) approach state-of-the-art classification accuracy across 8 standard datasets, encompassing vision and speech, ii) perform inference while preserving the hardware's underlying energy-efficiency and high throughput, running on the aforementioned datasets at between 1200 and 2600 frames per second and using between 25 and 275 mW (effectively > 6000 frames / sec / W) and iii) can be specified and trained using backpropagation with the same ease-of-use as contemporary deep learning. For the first time, the algorithmic power of deep learning can be merged with the efficiency of neuromorphic processors, bringing the promise of embedded, intelligent, brain-inspired computing one step closer.
* 7 pages, 6 figures