 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Ranging Inertial Odometry
Dec 11, 2025Ultra-wideband (UWB) has shown promising potential in GPS-denied localization thanks to its lightweight and drift-free characteristics, while the accuracy is limited in real scenarios due to its sensitivity to sensor arrangement and non-Gaussian pattern induced by multi-path or multi-signal interference, which commonly occurs in many typical applications like long tunnels. We introduce a novel neural fusion framework for ranging inertial odometry which involves a graph attention UWB network and a recurrent neural inertial network. Our graph net learns scene-relevant ranging patterns and adapts to any number of anchors or tags, realizing accurate positioning without calibration. Additionally, the integration of least squares and the incorporation of nominal frame enhance overall performance and scalability. The effectiveness and robustness of our methods are validated through extensive experiments on both public and self-collected datasets, spanning indoor, outdoor, and tunnel environments. The results demonstrate the superiority of our proposed IR-ULSG in handling challenging conditions, including scenarios outside the convex envelope and cases where only a single anchor is available.
$ν$-DBA: Neural Implicit Dense Bundle Adjustment Enables Image-Only Driving Scene Reconstruction
Apr 29, 2024



The joint optimization of the sensor trajectory and 3D map is a crucial characteristic of bundle adjustment (BA), essential for autonomous driving. This paper presents $\nu$-DBA, a novel framework implementing geometric dense bundle adjustment (DBA) using 3D neural implicit surfaces for map parametrization, which optimizes both the map surface and trajectory poses using geometric error guided by dense optical flow prediction. Additionally, we fine-tune the optical flow model with per-scene self-supervision to further improve the quality of the dense mapping. Our experimental results on multiple driving scene datasets demonstrate that our method achieves superior trajectory optimization and dense reconstruction accuracy. We also investigate the influences of photometric error and different neural geometric priors on the performance of surface reconstruction and novel view synthesis. Our method stands as a significant step towards leveraging neural implicit representations in dense bundle adjustment for more accurate trajectories and detailed environmental mapping.
GOOD: General Optimization-based Fusion for 3D Object Detection via LiDAR-Camera Object Candidates
Mar 17, 2023



3D object detection serves as the core basis of the perception tasks in autonomous driving. Recent years have seen the rapid progress of multi-modal fusion strategies for more robust and accurate 3D object detection. However, current researches for robust fusion are all learning-based frameworks, which demand a large amount of training data and are inconvenient to implement in new scenes. In this paper, we propose GOOD, a general optimization-based fusion framework that can achieve satisfying detection without training additional models and is available for any combinations of 2D and 3D detectors to improve the accuracy and robustness of 3D detection. First we apply the mutual-sided nearest-neighbor probability model to achieve the 3D-2D data association. Then we design an optimization pipeline that can optimize different kinds of instances separately based on the matching result. Apart from this, the 3D MOT method is also introduced to enhance the performance aided by previous frames. To the best of our knowledge, this is the first optimization-based late fusion framework for multi-modal 3D object detection which can be served as a baseline for subsequent research. Experiments on both nuScenes and KITTI datasets are carried out and the results show that GOOD outperforms by 9.1\% on mAP score compared with PointPillars and achieves competitive results with the learning-based late fusion CLOCs.
EMV-LIO: An Efficient Multiple Vision aided LiDAR-Inertial Odometry
Feb 15, 2023To deal with the degeneration caused by the incomplete constraints of single sensor, multi-sensor fusion strategies especially in LiDAR-vision-inertial fusion area have attracted much interest from both the industry and the research community in recent years. Considering that a monocular camera is vulnerable to the influence of ambient light from a certain direction and fails, which makes the system degrade into a LiDAR-inertial system, multiple cameras are introduced to expand the visual observation so as to improve the accuracy and robustness of the system. Besides, removing LiDAR's noise via range image, setting condition for nearest neighbor search, and replacing kd-Tree with ikd-Tree are also introduced to enhance the efficiency. Based on the above, we propose an Efficient Multiple vision aided LiDAR-inertial odometry system (EMV-LIO), and evaluate its performance on both open datasets and our custom datasets. Experiments show that the algorithm is helpful to improve the accuracy, robustness and efficiency of the whole system compared with LVI-SAM. Our implementation will be available upon acceptance.
Anti-degenerated UWB-LiDAR Localization for Automatic Road Roller in Tunnel
Sep 22, 2021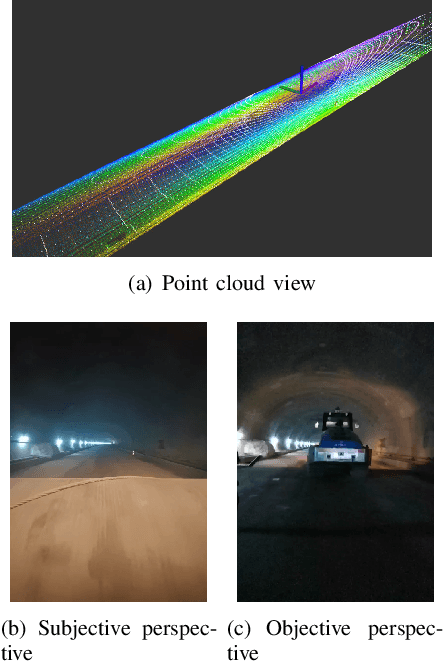
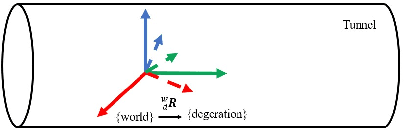
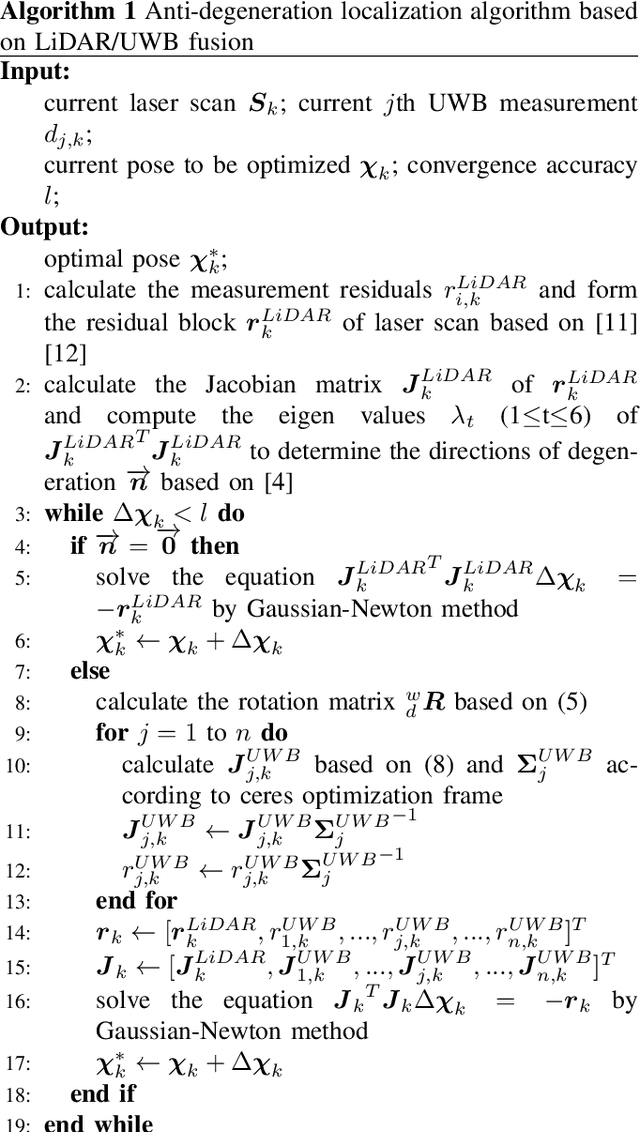

The automatic road roller, as a popular type of construction robot, has attracted much interest from both the industry and the research community in recent years. However, when it comes to tunnels where the degeneration issues are prone to happen, it is still a challenging problem to provide an accurate positioning result for the robot. In this paper, we aim to deal with this problem by fusing LiDAR and UWB measurements based on optimization. In the proposed localization method, the directions of non-degeneration will be constrained and the covariance of UWB reconstruction will be introduced to improve the accuracy of localization. Apart from these, a method that can extract the feature of the inner wall of tunnels to assist positioning is also presented in this paper. To evaluate the effectiveness of the proposed method, three experiments with real road roller were carried out and the results show that our method can achieve better performance than the existing methods and can be applied to automatic road roller working inside tunnels. Finally, we discuss the feasibility of deploying the system in real applications and make several recommendations.