 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnti-degenerated UWB-LiDAR Localization for Automatic Road Roller in Tunnel
Sep 22, 2021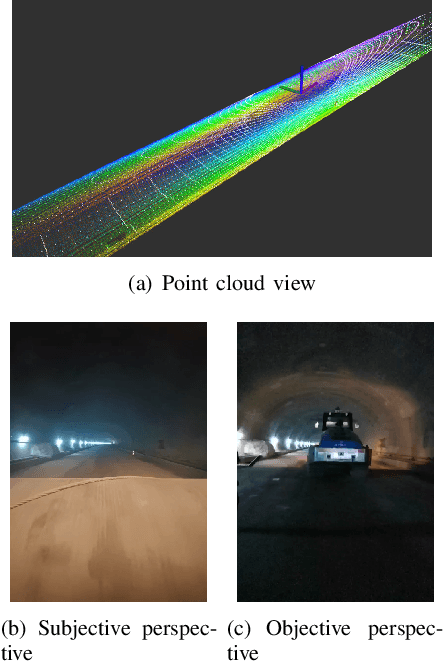
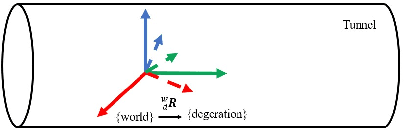
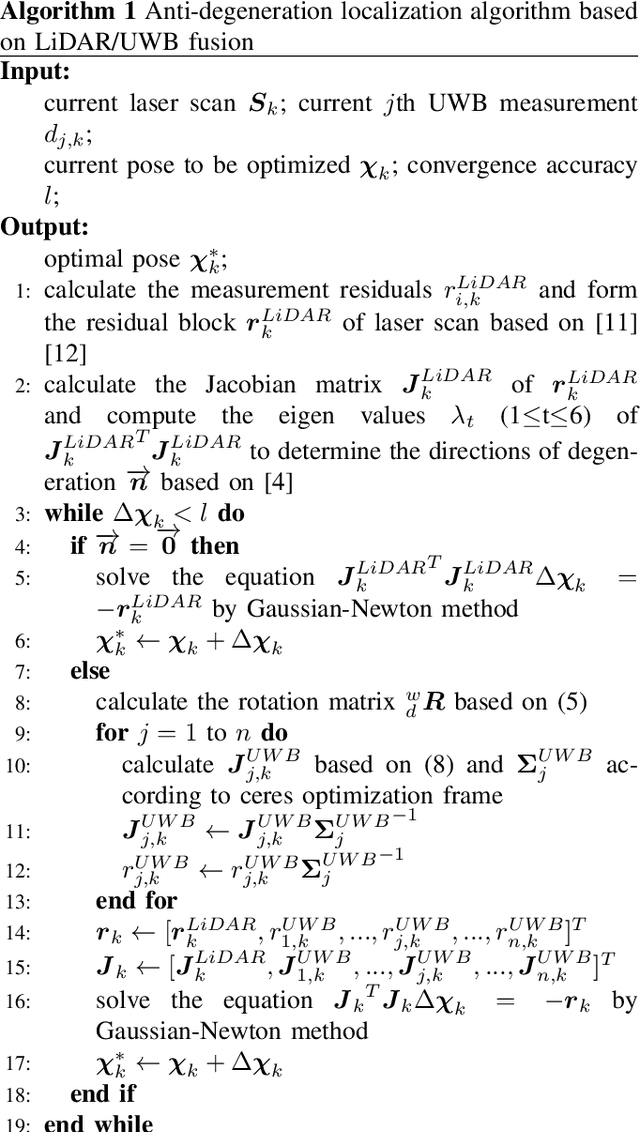

The automatic road roller, as a popular type of construction robot, has attracted much interest from both the industry and the research community in recent years. However, when it comes to tunnels where the degeneration issues are prone to happen, it is still a challenging problem to provide an accurate positioning result for the robot. In this paper, we aim to deal with this problem by fusing LiDAR and UWB measurements based on optimization. In the proposed localization method, the directions of non-degeneration will be constrained and the covariance of UWB reconstruction will be introduced to improve the accuracy of localization. Apart from these, a method that can extract the feature of the inner wall of tunnels to assist positioning is also presented in this paper. To evaluate the effectiveness of the proposed method, three experiments with real road roller were carried out and the results show that our method can achieve better performance than the existing methods and can be applied to automatic road roller working inside tunnels. Finally, we discuss the feasibility of deploying the system in real applications and make several recommendations.