 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAirways: Optimization-Based Planning of Quadrotor Trajectories according to High-Level User Goals
Jun 27, 2019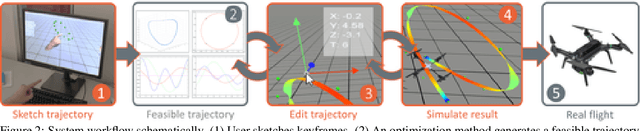
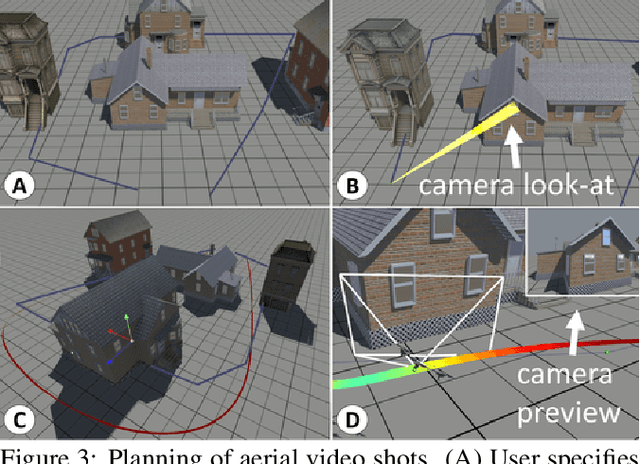

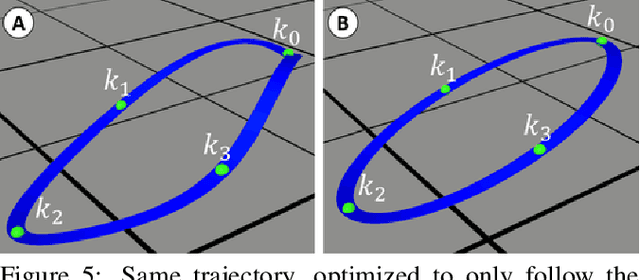
In this paper we propose a computational design tool that al-lows end-users to create advanced quadrotor trajectories witha variety of application scenarios in mind. Our algorithm al-lows novice users to create quadrotor based use-cases withoutrequiring deep knowledge in either quadrotor control or theunderlying constraints of the target domain. To achieve thisgoal we propose an optimization-based method that gener-ates feasible trajectories which can be flown in the real world.Furthermore, the method incorporates high-level human ob-jectives into the planning of flight trajectories. An easy touse 3D design tool allows for quick specification and edit-ing of trajectories as well as for intuitive exploration of theresulting solution space. We demonstrate the utility of our ap-proach in several real-world application scenarios, includingaerial-videography, robotic light-painting and drone racing.
* 12 pages
Plan3D: Viewpoint and Trajectory Optimization for Aerial Multi-View Stereo Reconstruction
Sep 18, 2018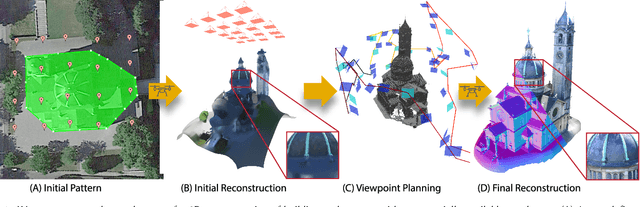
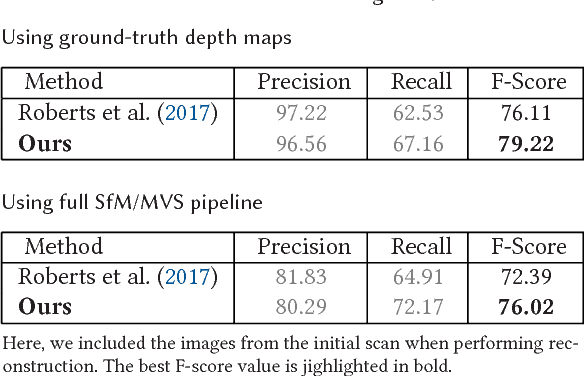
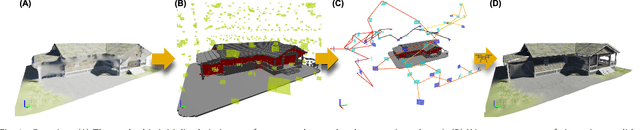
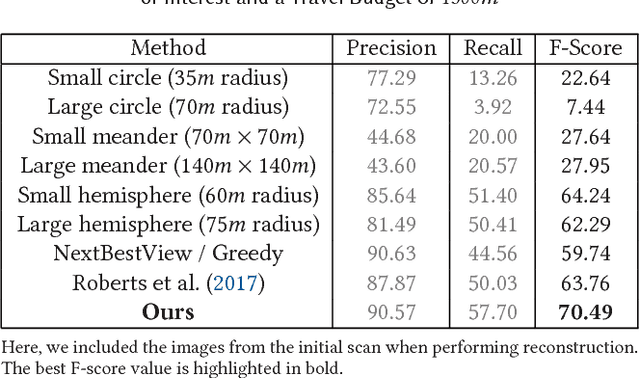
We introduce a new method that efficiently computes a set of viewpoints and trajectories for high-quality 3D reconstructions in outdoor environments. Our goal is to automatically explore an unknown area, and obtain a complete 3D scan of a region of interest (e.g., a large building). Images from a commodity RGB camera, mounted on an autonomously navigated quadcopter, are fed into a multi-view stereo reconstruction pipeline that produces high-quality results but is computationally expensive. In this setting, the scanning result is constrained by the restricted flight time of quadcopters. To this end, we introduce a novel optimization strategy that respects these constraints by maximizing the information gain from sparsely-sampled view points while limiting the total travel distance of the quadcopter. At the core of our method lies a hierarchical volumetric representation that allows the algorithm to distinguish between unknown, free, and occupied space. Furthermore, our information gain based formulation leverages this representation to handle occlusions in an efficient manner. In addition to the surface geometry, we utilize the free-space information to avoid obstacles and determine collision-free flight paths. Our tool can be used to specify the region of interest and to plan trajectories. We demonstrate our method by obtaining a number of compelling 3D reconstructions, and provide a thorough quantitative evaluation showing improvement over previous state-of-the-art and regular patterns.
Learn-to-Score: Efficient 3D Scene Exploration by Predicting View Utility
Jul 31, 2018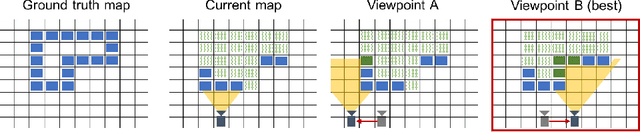
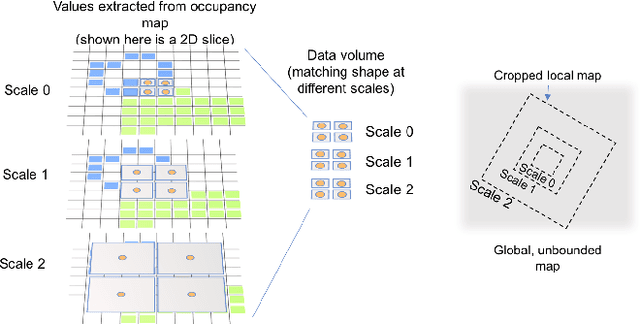
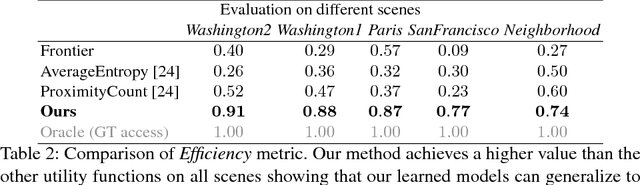
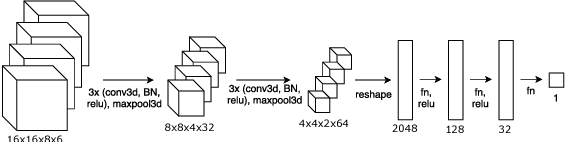
Camera equipped drones are nowadays being used to explore large scenes and reconstruct detailed 3D maps. When free space in the scene is approximately known, an offline planner can generate optimal plans to efficiently explore the scene. However, for exploring unknown scenes, the planner must predict and maximize usefulness of where to go on the fly. Traditionally, this has been achieved using handcrafted utility functions. We propose to learn a better utility function that predicts the usefulness of future viewpoints. Our learned utility function is based on a 3D convolutional neural network. This network takes as input a novel volumetric scene representation that implicitly captures previously visited viewpoints and generalizes to new scenes. We evaluate our method on several large 3D models of urban scenes using simulated depth cameras. We show that our method outperforms existing utility measures in terms of reconstruction performance and is robust to sensor noise.