 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSample Efficient Learning of Path Following and Obstacle Avoidance Behavior for Quadrotors
Jun 28, 2019



In this paper we propose an algorithm for the training of neural network control policies for quadrotors. The learned control policy computes control commands directly from sensor inputs and is hence computationally efficient. An imitation learning algorithm produces a policy that reproduces the behavior of a path following control algorithm with collision avoidance. Due to the generalization ability of neural networks, the resulting policy performs local collision avoidance of unseen obstacles while following a global reference path. The algorithm uses a time-free model predictive path-following controller as a supervisor. The controller generates demonstrations by following few example paths. This enables an easy to implement learning algorithm that is robust to errors of the model used in the model predictive controller. The policy is trained on the real quadrotor, which requires collision-free exploration around the example path. An adapted version of the supervisor is used to enable exploration. Thus, the policy can be trained from a relatively small number of examples on the real quadrotor, making the training sample efficient.
* 8 pages
Airways: Optimization-Based Planning of Quadrotor Trajectories according to High-Level User Goals
Jun 27, 2019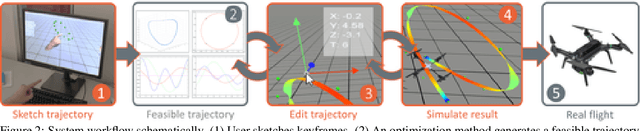
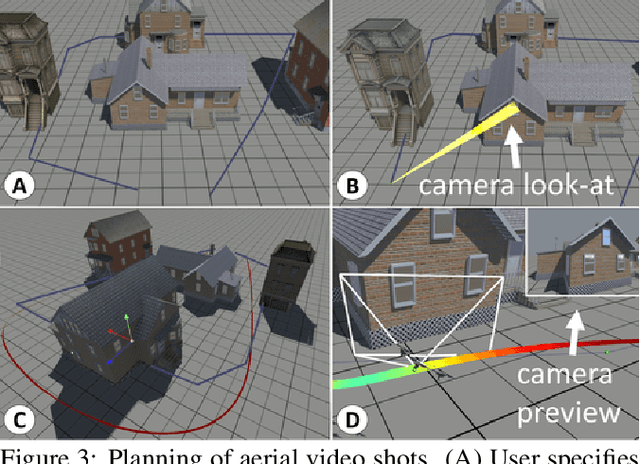

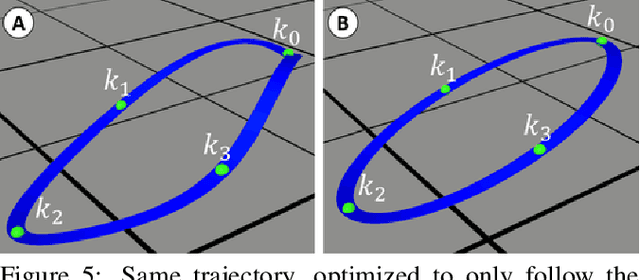
In this paper we propose a computational design tool that al-lows end-users to create advanced quadrotor trajectories witha variety of application scenarios in mind. Our algorithm al-lows novice users to create quadrotor based use-cases withoutrequiring deep knowledge in either quadrotor control or theunderlying constraints of the target domain. To achieve thisgoal we propose an optimization-based method that gener-ates feasible trajectories which can be flown in the real world.Furthermore, the method incorporates high-level human ob-jectives into the planning of flight trajectories. An easy touse 3D design tool allows for quick specification and edit-ing of trajectories as well as for intuitive exploration of theresulting solution space. We demonstrate the utility of our ap-proach in several real-world application scenarios, includingaerial-videography, robotic light-painting and drone racing.
* 12 pages