 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBlaming humans in autonomous vehicle accidents: Shared responsibility across levels of automation
Mar 21, 2018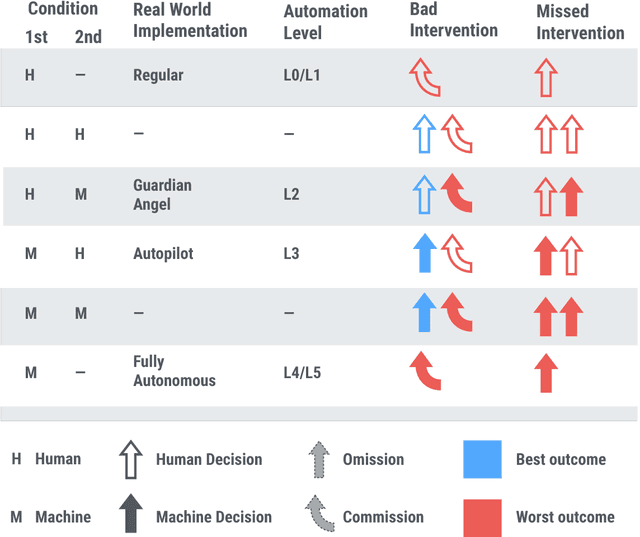
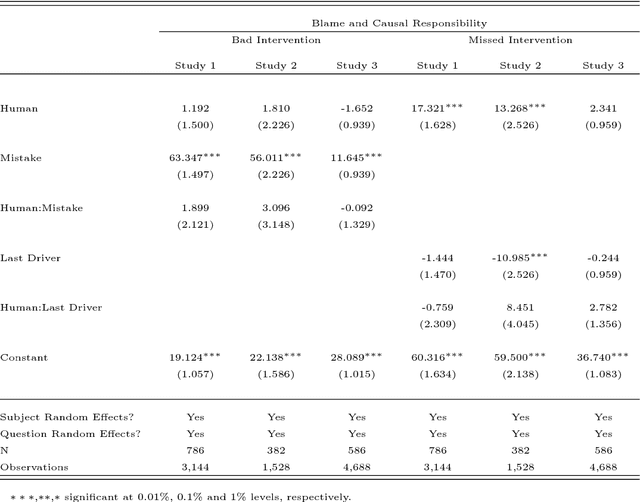
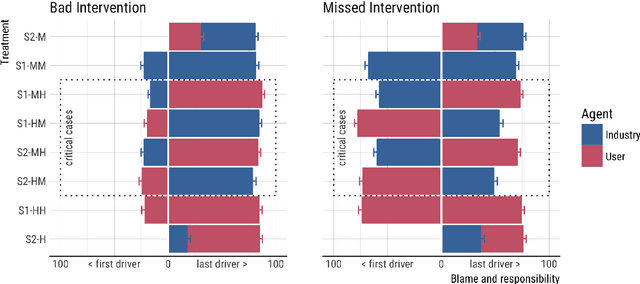
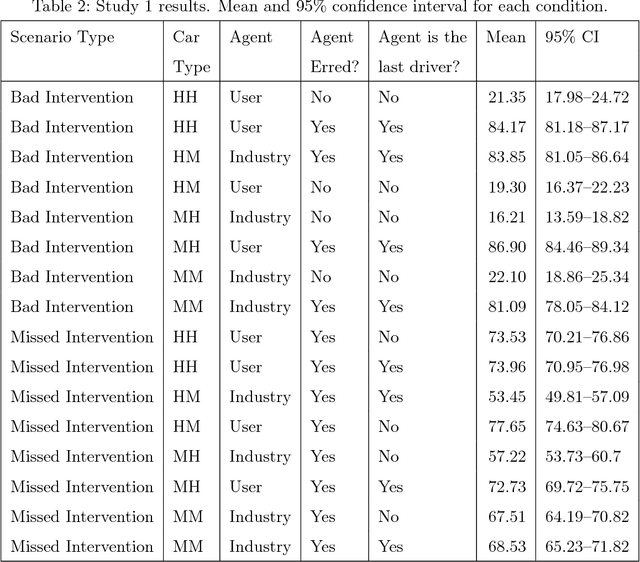
When a semi-autonomous car crashes and harms someone, how are blame and causal responsibility distributed across the human and machine drivers? In this article, we consider cases in which a pedestrian was hit and killed by a car being operated under shared control of a primary and a secondary driver. We find that when only one driver makes an error, that driver receives the blame and is considered causally responsible for the harm, regardless of whether that driver is a machine or a human. However, when both drivers make errors in cases of shared control between a human and a machine, the blame and responsibility attributed to the machine is reduced. This finding portends a public under-reaction to the malfunctioning AI components of semi-autonomous cars and therefore has a direct policy implication: a bottom-up regulatory scheme (which operates through tort law that is adjudicated through the jury system) could fail to properly regulate the safety of shared-control vehicles; instead, a top-down scheme (enacted through federal laws) may be called for.
Cooperating with Machines
Feb 21, 2018



Since Alan Turing envisioned Artificial Intelligence (AI) [1], a major driving force behind technical progress has been competition with human cognition. Historical milestones have been frequently associated with computers matching or outperforming humans in difficult cognitive tasks (e.g. face recognition [2], personality classification [3], driving cars [4], or playing video games [5]), or defeating humans in strategic zero-sum encounters (e.g. Chess [6], Checkers [7], Jeopardy! [8], Poker [9], or Go [10]). In contrast, less attention has been given to developing autonomous machines that establish mutually cooperative relationships with people who may not share the machine's preferences. A main challenge has been that human cooperation does not require sheer computational power, but rather relies on intuition [11], cultural norms [12], emotions and signals [13, 14, 15, 16], and pre-evolved dispositions toward cooperation [17], common-sense mechanisms that are difficult to encode in machines for arbitrary contexts. Here, we combine a state-of-the-art machine-learning algorithm with novel mechanisms for generating and acting on signals to produce a new learning algorithm that cooperates with people and other machines at levels that rival human cooperation in a variety of two-player repeated stochastic games. This is the first general-purpose algorithm that is capable, given a description of a previously unseen game environment, of learning to cooperate with people within short timescales in scenarios previously unanticipated by algorithm designers. This is achieved without complex opponent modeling or higher-order theories of mind, thus showing that flexible, fast, and general human-machine cooperation is computationally achievable using a non-trivial, but ultimately simple, set of algorithmic mechanisms.
* An updated version of this paper was published in Nature Communications