 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntercepting the Future: Latent-Space Predictive World Model for Dynamic VLA Manipulation
Jun 01, 2026Vision-Language-Action (VLA) models generalize across static manipulation but fail when objects move during task execution. They map the current observation to an action and assume the scene is stationary between observation and execution, so at any non-trivial object speed the resulting latency exceeds the time available to grasp. We close this gap with AHEAD (Anticipatory Horizon Extrapolation with Adaptive Dynamics), a predict-then-act wrapper that augments a frozen VLA with a motion-aware latent world model. A small world model trained on manipulation video forecasts future patch tokens in the VLA's feature space, conditioned on per-token velocity and acceleration from optical flow. A language-and-motion saliency mask concentrates prediction on task-relevant patches, and the model rolls forward for an adaptive horizon, halting when prediction uncertainty crosses a threshold. The frozen action decoder then receives the predicted future tokens in place of the current ones. AHEAD adds 4.9M parameters to a frozen 7B OpenVLA and reaches 79 to 97% success across 20 dynamic simulation scenarios where the strongest baseline reaches 31 to 58%. On a physical UFactory xArm 7, AHEAD succeeds on 29/30 to 30/30 on three conveyor and rolling-ball tasks, 23/30 on paddle interception, and 19/30 on projectile catching where every baseline scores 0/30.
ExpReS-VLA: Specializing Vision-Language-Action Models Through Experience Replay and Retrieval
Nov 09, 2025



Vision-Language-Action models such as OpenVLA show impressive zero-shot generalization across robotic manipulation tasks but often fail to adapt efficiently to new deployment environments. In many real-world applications, consistent high performance on a limited set of tasks is more important than broad generalization. We propose ExpReS-VLA, a method for specializing pre-trained VLA models through experience replay and retrieval while preventing catastrophic forgetting. ExpReS-VLA stores compact feature representations from the frozen vision backbone instead of raw image-action pairs, reducing memory usage by approximately 97 percent. During deployment, relevant past experiences are retrieved using cosine similarity and used to guide adaptation, while prioritized experience replay emphasizes successful trajectories. We also introduce Thresholded Hybrid Contrastive Loss, which enables learning from both successful and failed attempts. On the LIBERO simulation benchmark, ExpReS-VLA improves success rates from 82.6 to 93.1 percent on spatial reasoning tasks and from 61 to 72.3 percent on long-horizon tasks. On physical robot experiments with five manipulation tasks, it reaches 98 percent success on both seen and unseen settings, compared to 84.7 and 32 percent for naive fine-tuning. Adaptation takes 31 seconds using 12 demonstrations on a single RTX 5090 GPU, making the approach practical for real robot deployment.
Adversarial Game-Theoretic Algorithm for Dexterous Grasp Synthesis
Nov 08, 2025For many complex tasks, multi-finger robot hands are poised to revolutionize how we interact with the world, but reliably grasping objects remains a significant challenge. We focus on the problem of synthesizing grasps for multi-finger robot hands that, given a target object's geometry and pose, computes a hand configuration. Existing approaches often struggle to produce reliable grasps that sufficiently constrain object motion, leading to instability under disturbances and failed grasps. A key reason is that during grasp generation, they typically focus on resisting a single wrench, while ignoring the object's potential for adversarial movements, such as escaping. We propose a new grasp-synthesis approach that explicitly captures and leverages the adversarial object motion in grasp generation by formulating the problem as a two-player game. One player controls the robot to generate feasible grasp configurations, while the other adversarially controls the object to seek motions that attempt to escape from the grasp. Simulation experiments on various robot platforms and target objects show that our approach achieves a success rate of 75.78%, up to 19.61% higher than the state-of-the-art baseline. The two-player game mechanism improves the grasping success rate by 27.40% over the method without the game formulation. Our approach requires only 0.28-1.04 seconds on average to generate a grasp configuration, depending on the robot platform, making it suitable for real-world deployment. In real-world experiments, our approach achieves an average success rate of 85.0% on ShadowHand and 87.5% on LeapHand, which confirms its feasibility and effectiveness in real robot setups.
Work Smarter Not Harder: Simple Imitation Learning with CS-PIBT Outperforms Large Scale Imitation Learning for MAPF
Sep 22, 2024



Multi-Agent Path Finding (MAPF) is the problem of effectively finding efficient collision-free paths for a group of agents in a shared workspace. The MAPF community has largely focused on developing high-performance heuristic search methods. Recently, several works have applied various machine learning (ML) techniques to solve MAPF, usually involving sophisticated architectures, reinforcement learning techniques, and set-ups, but none using large amounts of high-quality supervised data. Our initial objective in this work was to show how simple large scale imitation learning of high-quality heuristic search methods can lead to state-of-the-art ML MAPF performance. However, we find that, at least with our model architecture, simple large scale (700k examples with hundreds of agents per example) imitation learning does \textit{not} produce impressive results. Instead, we find that by using prior work that post-processes MAPF model predictions to resolve 1-step collisions (CS-PIBT), we can train a simple ML MAPF model in minutes that dramatically outperforms existing ML MAPF policies. This has serious implications for all future ML MAPF policies (with local communication) which currently struggle to scale. In particular, this finding implies that future learnt policies should (1) always use smart 1-step collision shields (e.g. CS-PIBT), (2) always include the collision shield with greedy actions as a baseline (e.g. PIBT) and (3) motivates future models to focus on longer horizon / more complex planning as 1-step collisions can be efficiently resolved.
Improving Learnt Local MAPF Policies with Heuristic Search
Mar 29, 2024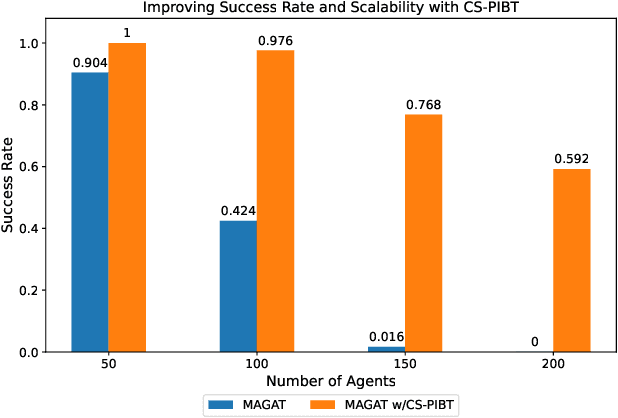

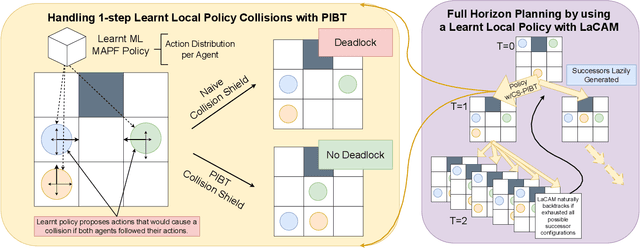

Multi-agent path finding (MAPF) is the problem of finding collision-free paths for a team of agents to reach their goal locations. State-of-the-art classical MAPF solvers typically employ heuristic search to find solutions for hundreds of agents but are typically centralized and can struggle to scale when run with short timeouts. Machine learning (ML) approaches that learn policies for each agent are appealing as these could enable decentralized systems and scale well while maintaining good solution quality. Current ML approaches to MAPF have proposed methods that have started to scratch the surface of this potential. However, state-of-the-art ML approaches produce "local" policies that only plan for a single timestep and have poor success rates and scalability. Our main idea is that we can improve a ML local policy by using heuristic search methods on the output probability distribution to resolve deadlocks and enable full horizon planning. We show several model-agnostic ways to use heuristic search with learnt policies that significantly improve the policies' success rates and scalability. To our best knowledge, we demonstrate the first time ML-based MAPF approaches have scaled to high congestion scenarios (e.g. 20% agent density).
AI-assisted Tagging of Deepfake Audio Calls using Challenge-Response
Feb 28, 2024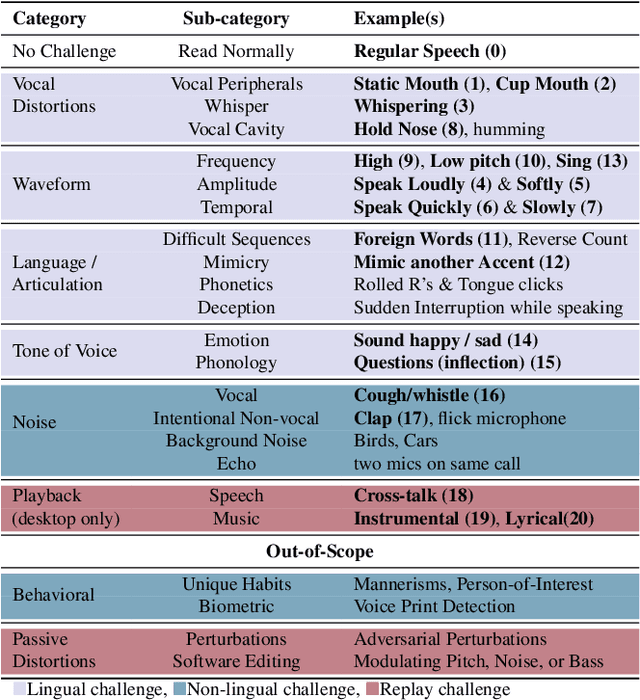
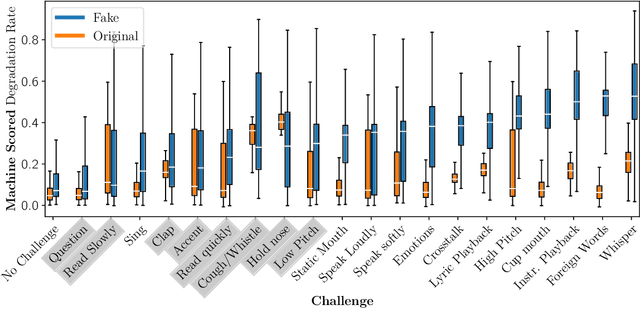
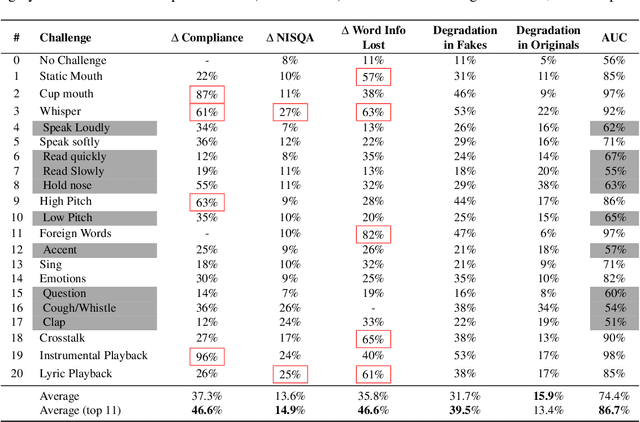
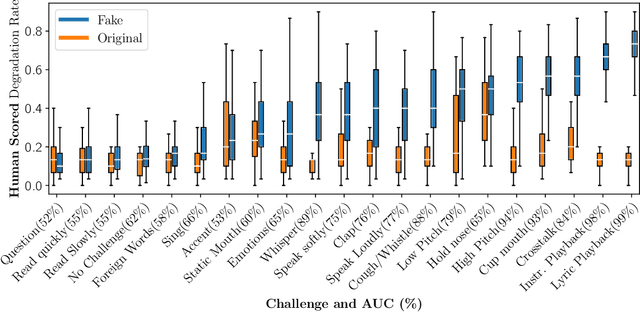
Scammers are aggressively leveraging AI voice-cloning technology for social engineering attacks, a situation significantly worsened by the advent of audio Real-time Deepfakes (RTDFs). RTDFs can clone a target's voice in real-time over phone calls, making these interactions highly interactive and thus far more convincing. Our research confidently addresses the gap in the existing literature on deepfake detection, which has largely been ineffective against RTDF threats. We introduce a robust challenge-response-based method to detect deepfake audio calls, pioneering a comprehensive taxonomy of audio challenges. Our evaluation pitches 20 prospective challenges against a leading voice-cloning system. We have compiled a novel open-source challenge dataset with contributions from 100 smartphone and desktop users, yielding 18,600 original and 1.6 million deepfake samples. Through rigorous machine and human evaluations of this dataset, we achieved a deepfake detection rate of 86% and an 80% AUC score, respectively. Notably, utilizing a set of 11 challenges significantly enhances detection capabilities. Our findings reveal that combining human intuition with machine precision offers complementary advantages. Consequently, we have developed an innovative human-AI collaborative system that melds human discernment with algorithmic accuracy, boosting final joint accuracy to 82.9%. This system highlights the significant advantage of AI-assisted pre-screening in call verification processes. Samples can be heard at https://mittalgovind.github.io/autch-samples/